
PRC Research on Blended Wing Body Underwater Gliders
This is the second installment of a multi-part series concerning the deployment of semi-autonomous, mobile minefields using strikepods comprised of underwater gliders. In Part I we discussed the underwater glider and its related technologies, and proposed a notional design for a blended wing glider-mine. This installment analyzes research conducted by PRC scientists on blended wing underwater gliders. Future installments will focus on concepts of operations (CONOPs), the strategic use and effects of mobile minefields, glider-mine countermeasures, the role of international law, and tabletop simulations illustrating mobile minefield operations.
Over the past seven years, PRC scientists have authored at least forty-four articles related to blended wing underwater gliders, a type of unmanned underwater vehicle (UUV) known for its long endurance and large payload capacity. The majority of these studies were authored by scientists affiliated with institutions linked to the People's Liberation Army (PLA) and Navy (PLAN).
An underwater glider is a semi-autonomous unmanned underwater vehicle (UUV) that uses a combination of wings, stabilizers, and variable buoyancy to propel itself through the water column. Conventional gliders have a hydrodynamically efficient cyllindrical shape, and are roughly 1.5 to 2.5 meters in length, and weigh approximately 50kg. They are ideal hydrographic sensor platforms for both civilian and defense users, as they are capable of remaining in-situ for extended periods. But given their size and construction, conventional gliders are limited in terms of speed and payload capacity, which in turn limits the missions that this vehicle can carry out.
A conventional Slocum underwater glider
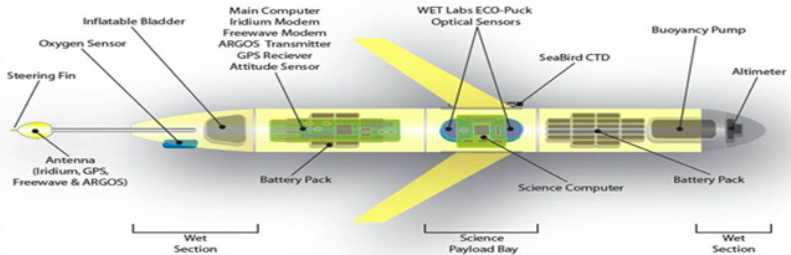
In the early 2000s, U.S. researchers sought to develop a high-endurance underwater glider that was capable of carrying large payloads. The result was the XRay blended wing underwater glider, and its successor, the ZRay. With its hydrodynamic efficiency and high lift to drag ratio, the ZRay was reportedly capable of carrying payloads measured in hundreds of kilograms, reaching speeds of 5 kts (compared to 1 kt for conventional gliders), and operating for months at a time. The ZRay could carry a full array of hydroacoustic sensors, making it an ideal platform for monitoring marine life or submarines.
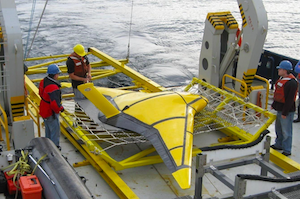
The ZRay
While the stated aim for such a vehicle is scientific observation and undersea surveillance, we previously published an analysis of blended wing underwater gliders suggesting their potential as a weapons platform - specifically, for structuring mobile, semi-autonomous minefields. In that report, we alluded to PRC interest in this platform as evidenced by the number of published (English language) scientific papers on the subject, and indicated that a number of these researchers were affiliated with institutions having ties to the People's Liberation Army (PLA) or People's Liberation Army Navy (PLAN). What follows below is a more thorough analysis of these articles in an effort to understand the nature and extent of PRC interest in this particular type of unmanned underwater vehicle, and if possible to gain insight into PRC plans for its use.
The full database of articles is available here..
KEY FINDINGS:
▶︎ Using a variety of keyword search strategies, Google Scholar identified a total of sixty-nine articles focusing on blended wing underwater gliders. Over half of these (44) were authored by PRC scientists.
All forty-four articles were published within the last seven years, and of these, nearly fifty percent (20) have been published in the last two years alone, suggesting a steadily increasing interest in blended wing underwater gliders among PRC scientists.
While PRC research into blended wing underwater gliders is noteworthy, it should also be noted that China has a long-standing (and also steadily increasing) interest in conventional underwater gliders as platforms for ocean surveillance. Two notable PRC glider variants are the the Haiyi ("Sea Wing"), developed by Shenyang Institute of Automation under the Chinese Academy of Sciences, and the Haiyan ("Petrel"), developed by Tianjin University. China has deployed gliders to the South China Sea and Indian Ocean, ostensibly for scientific research purposes, but given the dual-use nature of hydrographic data, China, like the United States, is likely deploying gliders for anti-submarine warfare (ASW) purposes as well. Given the extended endurance and large payload capacity of blended wing underwater gliders, it should come as no surprise that China would explore this type of underwater vehicle as a means to deploy heavier, more sophisticated sensors for long periods of time at increased range.
▶︎ Thirteen publications were authored by U.S. scientists. No U.S. publications or articles appear to have been published since 2013.
This does not necessarily mean that U.S. research into blended wing underwater gliders has ended. It may have provided a foundation for DARPA's Manta Ray program. Alternatively, U.S. research efforts may have "gone black" and formed the basis for classified research and development.
▶︎ Although the majority of PRC universities maintain ties to China's defense industry, of the forty-four articles authored by Chinese scientists, over three quarters were authored by individuals affiliated with Northwestern Polytechnical University, Nanjing University, or Harbin Engineering University, three of the "Seven Sons of National Defense."
With its clear undersea warfare applications, it is likely that China is interested in blended wing underwater gliders for intelligence, surveillance, and reconnaissance (ISR), as well as anti-submarine warfare (ASW). However, none of the articles found focus explicitly on these capabilities. There are two articles (see below) that suggest China is exploring the vehicle's potential for use in minelaying or seabed warfare, however those articles do not focus on these capabilities either, but rather on the hydrodynamic characteristics of a "weapons bay." While it is possible that China is developing the blended wing underwater glider as a weapons platform, an analysis of the available literature does not indicate that such an effort is underway.
▶︎ Articles authored by PRC scientists focus primarily on shape optimization and performance characteristics, such as vehicle lift-to-drag ratio and hydrodynamic efficiency.
Many articles propose alternative analytic frameworks for use in optimizing vehicle shape given specific design objectives, such as maximizing hydrodynamic performance, or physical parameters, such as payload capacity. Given that these analyses often consume a great deal of IT resources (memory, processing power), a recurring theme is the desire to reduce "computational expense" by using iterative, algorithmic methodologies as opposed to running highly complex "full body" analyses.
▶︎ By contrast, publications by U.S. researchers focused primarily on topics related to the ZRay (or its predecessor, XRay) blended wing underwater glider and its related software, sensors, or CONOPS.
The majority of these were reports published by U.S. Department of Defense partner organizations (Scripps, Woods Hole) and indexed by the Defense Technical Information Center (DTIC), or articles published by the Journal of the Acoustical Society of America focusing on hydroacoustic analysis using a blended wing underwater glider as the sensor platform.
▶︎ Only two articles by PRC authors focused on vehicle energy consumption.
Conventional gliders are capable of high-endurance missions because relatively little energy is consumed for propulsion, leaving more to power onboard C2, processing, and sensor payloads. Such is the case for blended wing underwater gliders as well, but with the added benefit of larger batteries given the vehicle's payload capacity. Nevertheless, energy efficiency remains crucial in order for the platform to integrate increasingly demanding sensor payloads and remain in situ for extended periods of time. Chinese scientists explore the energy usage of blended wing underwater gliders by modeling their consumption under various performance conditions (glide ratio, depth, buoyancy adjustments), and also propose a method to minimize consumption per nautical mile.
▶︎ Two articles (highlighted below), a paper and related conference presentation, focus on the "weapons bay" of a blended wing underwater glider, and the hydrodynamic performance changes that occur when a weapon (presumably a mine) is released.
Given its heavyweight payload capacity, a blended wing underwater glider could potentially deploy bottom mines in a manner similar to the U.S. Navy's Submarine Launched Mobile Mine (SLMM) or Mining Expendable Delivery Unmanned Submarine Asset (MEDUSA). However, the vehicle would be unable to accommodate these types of systems within an internal weapons bay, as their dimensions would exceed those of the glider itself. If carried externally, it may be possible for the vehicle to launch such weapons, or other conventional standoff weapons such as lightweight ASW torpedoes. It may also be possible for the vehicle to stow small, gravity-assisted munitions within its weapons bay, and to employ them against seabed targets, but it would be unable to rapidly egress the area making it vulnerable to damage or destruction by the resulting shock wave.
RESEARCH NOTES:
-
PRC authors commonly use the abbreviation "BWBUG" for Blended Wing-Body Underwater Glider. This abbreviation is used in the summaries below. Other Chinese terms include "flying wing-body" or "fusion wing-body."
-
Research was conducted using Google Scholar. The following search terms were used: blended wing underwater glider, flying wing underwater glider, fusion wing underwater glider, blended wing-body underwater glider, ZRay glider, Z-Ray glider, XRay glider, X-Ray glider, and BWBUG.
-
Only articles focusing on blended wing underwater gliders were included in this report. Keyword searches occasionally tagged articles containing the search terms within the body of the article text, but those articles were excluded if they merely referenced blended wing underwater gliders and did not focus primarily on some aspect of the vehicle itself - i.e. performance, system integration, operations.
-
While not focusing expressly on blended wing underwater gliders, articles by ROK scientists focused on "ray" type underwater vehicles were included in national affiliation data. In addition, while they are technically not gliders in the sense that their propulsion is derived from external actuation, PRC articles on manta ray shaped, biomimetic underwater vehicles were included as well.
CAVEATS:
-
This report should not be considered an exhaustive literature review. It is derived solely from the use of a single search engine, Google Scholar, which, while comprehensive, is a largely English-language resource that relies on web crawling to identify and index entries. A more granular search of academic or specialized subject matter databases may result in the identification of additional articles and publications.
-
Some citations link directly to PDFs of the full text, while others link to the publisher or aggregator (e.g. Science Direct, Elsevier, JSTOR) and only provide access to general information (author, publication name), the article abstract, and illustration thumbnails. In a handful of cases a citation was found, but no link was provided.
-
Due to access limitations, most article summaries are based on the abstract provided by the publisher/aggregator, not the entirety of the article.
NUMBER OF PUBLICATIONS BY NATIONAL AFFILIATION
| COUNTRY | PUBLICATIONS |
|---|---|

|
44 |

|
13 |

|
5 |

|
3 |

|
2 |

|
1 |

|
1 |
CHINESE PUBLICATIONS BY INSTITUTIONAL AFFILIATION
 INSTITUTION INSTITUTION
|
PUBLICATIONS† |
|---|---|
| Northwestern Polytechnical University | 33 |
| Jiangsu University of Science and Technology | 3 |
| Chinese Academy of Sciences | 3 |
| Harbin Engineering University | 2 |
| Beihang University | 1 |
| Sun Yat-Sen University | 1 |
| Nanjing University | 1 |
| System Engineering Research Institute | 1 |
| Luoyang Institute of Electro-Optical Equipment | 1 |
LISTING OF CHINESE PUBLICATIONS
In Descending Date Order
BWBUG = "Blended Wing-Body Underwater Glider"
▶︎ Numerical simulation of hydrodynamic and noise characteristics for a blended-wing-body underwater glider
Ocean Engineering
May, 2022
Denghui Qin, Qiaogao Huang, Guang Pan, Yao Shi, Fuzheng Li, Peng Han
Affiliation:
Key Laboratory for Unmanned Underwater Vehicle
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Analyzes vehicle noise characteristics and finds that a BWBUG (64.78 dB) is approximately 30% quieter than a conventional Slocum glider (91.49 dB). Also finds that the blended-wing-body glider has a maximum lift/drag ratio of 15.38, nearly three times greater than that of the Slocum at 5.84.
▶︎ Constrained Multi-objective Large Deformation Shape Optimization of Blended-Wing-Body Underwater Glider
Advances in Mechanical Design
March, 2022
Wenyi Long, Peng Wang, Huachao Dong, Weixi Chen, Xubo Yang
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Explores the tradeoffs between hydrodynamic performance and payload capacity, and proposes a method to optimize BWBUG shape while taking into account vehicle lift-to-drag ratio, internal volume, as well as size and position of internal components.
▶︎ Numerical simulations for predicting wave force effects on dynamic and motion characteristics of blended winged-body underwater glider
Ocean Engineering
September, 2021
Xiaoxu Du, Naveed Ali, Lianying Zhang
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Simulates the influence of waves on the hydrodynamic performance and motion characteristics of a BWBUG in order to predict its stability, control, and navigational performance along a particular glidepath.
▶︎ An Efficient Surrogate-Based Optimization Method for BWBUG Based on Multifidelity Model and Geometric Constraint Gradients
Mathematical Problems in Engineering
August, 2021
Daiyu Zhang, Bei Zhang, Zhidong Wang, Xinyao Zhu
Affiliation:
School of Naval Architecture and Ocean Engineering
Jiangsu University of Science and Technology
Summary:
Proposes a surrogate-based algorithmic optimization method using a multifidelity model and geometric constraint gradient information to reduce computational expense and improve optimization efficiency.
▶︎ Numerical study on the steady suction active flow control of hydrofoil in the profile of the blended-wing-body underwater glider
Journal of Northwestern Polytechnical University
August, 2021
Du Xiaoxu, Zhang Lianying
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
"In order to explore the influence law and mechanism of the steady suction active flow control on the lift and drag performance of the hydrofoil, which is the profile of the blended-wing-body underwater glider, based on the computational fluid dynamics (CFD) method and SST k-ω turbulence model, the steady suction active flow control of hydrofoil under different conditions is studied, which include three suction factors: suction angle, suction position and suction ratio, as well as three different flow states: no stall, critical stall and over stall."
Chinese language version here
▶︎ SGOP: Surrogate-assisted global optimization using a Pareto-based sampling strategy
Applied Soft Computing
July, 2021
Huachao Dong, Peng Wang, Weixi Chen, Baowei Song
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes an efficient global optimization algorithm for use in analyzing "computationally intensive black-box problems" that involve multiple surrogates for optimization. The algorithm is then applied to BWBUG shape optimization resulting in a highly improved lift-to-drag ratio.
▶︎ Surrogate based blended-wing-body underwater glider shape optimization design
Journal of Northwestern Polytechnical University
April, 2021
Pengcheng Ye, Congcong Wang, Guang Pan
Affiliations:
- School of Marine Science and Technology
Key Laboratory for Unmanned Underwater Vehicle
Northwestern Polytechnical University - Luoyang Institute of Electro-Optical Equipment, Aviation Industry Corporation of China
Summary:
Proposes an optimization framework to maximize BWBUG hydrodynamic performance and payload capacity through improved lift-to-drag ratio (LDR), which results in a 24.32% increase in LDR.
▶︎ Shape Optimization for Blended-Wing-Body Underwater Gliders with Structure Constraint
International Conference on Control, Automation and Robotics (ICCAR)
April, 2021
Xing’an Liu, Dongli Ma, Cheng He, Xinglu Xia
Affiliation:
School of Aeronautic Science and Engineering
Beihang University
Summary:
Proposes a method to improve BWBUG hydrodynamic efficiency and performance that focuses on structural constraints, such as the vehicle's pressure hull, or the arrangement of structural components. Results in a 12.4% improvement in lift-to-drag ratio.
▶︎ Numerical Computation of Wave Forces on Blended Winged-Body Underwater Glider using Panel Method
International Bhurban Conference on Applied Sciences and Technologies (IBCAST) (Proceedings)
January, 2021
Xiaoxu Du, Naveed Ali
Affiliation:
School of Naval Architecture & Ocean Engineering
Jiangsu University of Science and Technology
Summary:
Proposes a method to numerically capture the wave forces operating on a submerged BWBUG while operating along a particular glide path.
▶︎ Kriging-based shape optimization framework for blended-wing-body underwater glider with NURBS-based parametrization
Ocean Engineering
January, 2021
Daiyu Zhang, Zhidong Wang, Hongjie Ling, Xinyao Zhu
Affiliation:
School of Naval Architecture & Ocean Engineering
Jiangsu University of Science and Technology
Summary:
Proposes an algorithmic methodology to optimize vehicle lift-to-drag ratio
▶︎ Hydrodynamic and shape optimization design of wing-body fusion underwater glider
Ship Engineering
2021
Zhang Daiyu, Zhang Bei, Wang Zhidong, Ling Hongjie, Zhang Lingli
Nanjing University
Summary:
Simulates BWBUG hydrodynamic performance using fluid calculation software FINE/Marine. Using a combination algorithmic optimization strategy, proposes an optimized shape to increase lift-drag ratio given internal volume constraints. Results in a 15.3% increase in lift-drag ratio, a 6.5% reduction in drag coefficient, and a 7.8% improvement in lift coefficient. Comprehensive weight of hydrodynamics increased by 15.39%, cabin capacity increased by 18.35%, and overall gliding stability was improved.
▶︎ A study on the hydrodynamic performance of manta ray biomimetic glider under unconstrained six-DOF motion
PLOS One
November, 2020
Wen-Hao Cai, Jie-Min Zhan, Ying-Ying Luo
Affiliations:
- Department of Applied Mechanics and Engineering, Sun Yat-Sen University
- Institute of Road and Bridge, Guangdong Provincial Academy of Building Research Group Co., Ltd.
Summary:
Proposes a design for a manta ray biomimetic glider which is developed using a motion-based zonal mesh update (MBZMU) method to simulate and examine the vehicle's hydrodynamic performance.
▶︎ Design optimization for a Cabin-Skeleton Coupling Structure of Blended-wing-body Underwater Glider
International Conference on Unmanned Systems (ICUS) (Proceedings)
November, 2020
Yijin Zhang, Peng Wang, Huachao Dong, Xinkai Yu
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Models a cabin-skeleton coupling structure used for fortifying the internal space of a BWBUG against extreme ocean pressures. A surrogate-based constrained global optimization algorithm (SCGOSR) achieves a 43% increase in vehicle buoyancy-to-weight ratio given strength, stiffness, and stability constraints.
▶︎ Ful1-Parameters shape optimization design for blended-wing-body underwater gliders
International Conference on Unmanned Systems (ICUS) (Proceedings)
November, 2020
Xinkai Yu, Peng Wang, Huachao Dong
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes a geometric parameterization method to generate design variables when optimizing BWBUG shape and maximizing lift-to-drag ratio. Results in a 4.4226% increase in lift-to-drag ratio when optimizing for cross-sectional shape parameters, and a 2.4564% increase when optimizing for planar.
▶︎ Hydrodynamic Performance Analysis of Fly-Wing Underwater Glider Flaps Based on Overlapped Grid Technology
Global Oceans 2020: Singapore – U.S. Gulf Coast (Proceedings)
October, 2020
Zhenyu Wang, Feng Hu, Jiancheng Yu, Yan Huang, Jianan Qiao, Zongbo Xie
Affiliation:
State Key Laboratory of Robotics
Shenyang Institute of Automation
Chinese Academy of Sciences
Summary:
Examines the influence of flaps on BWBUG hydrodynamic characteristics using computational fluid dynamics and overlapped grid method, as well as the influence of different design parameters on vehicle lift-to-drag ratio.
▶︎ Shape optimization of a blended-wing-body underwater glider using surrogate-based global optimization method IESGO-HSR
Science Progress
September, 2020
Affiliation:
Pengcheng Ye, Guang Pan
Key Laboratory for Unmanned Underwater Vehicle
Northwestern Polytechnical University
Summary:
Proposes a method to optimize BWBUG shape using a parametric geometric model to generate seven different airfoils. Improved surrogates based global optimization method using a hierarchical design space reduction strategy (IESGO-HSR) are then used to analyze the airfoils and determine the optimal design, which results in a 24.32% improvement in lift to drag ratio.
▶︎ Performance study of a simplified shape optimization strategy for blended-wing-body underwater gliders
International Journal of Naval Architecture and Ocean Engineering
June, 2020
Chengshan Li, Peng Wang, Tianbo Li, Huachao Dong
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes a computationally inexpensive framework that optimizes sectional airfoils instead of the 3-D shape of a BWBUG.
▶︎ A Double-Stage Surrogate-Based Shape Optimization Strategy for Blended-Wing-Body Underwater Gliders
China Ocean Engineering
June, 2020
Cheng-shan Li, Peng Wang, Zhi-ming Qiu, Hua-chao Dong
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes a BWBUG shape optimization strategy using a double-stage surrogate model as an alternative to the computationally expensive high-dimensional models, resulting in a 9.35% increase in vehicle lift-to-drag at half the time cost of other models.
▶︎ Analysis on energy consumption of blended-wing-body underwater glider
International Journal of Advanced Robotic Systems
April, 2020
Xiaoxu Du, Lianying Zhang
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Simulates the energy consumption of a BWBUG given different depths, glide ratios, and adjustments in buoyancy. Concludes that low energy consumption can be achieved through larger glide ratios, larger glide depths, and smaller buoyancy adjustments.
▶︎ Research on Hydrodynamic Characteristics of Blended Wing Body Underwater Glider with Rudder
Journal of Northwestern Polytechnical University
February, 2020
Yunlong Ma, Guang Pan, Qiaogao Huang, Jinglu Li
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Simulates a BWBUG with an integrated trailing edge rudder. Finds that maneuverability is improved, while lift-to-drag ratio is increased by more than 30% compared to a conventional glider. Compares BWBUG rudder/body operational dynamics with those of a traditional torpedo and an autonomous underwater vehicle.
▶︎ Shape optimization for blended-wing–body underwater glider using an advanced multi-surrogate-based high-dimensional model representation method
Engineering Optimization
December, 2019
Ning Zhang, Peng Wang, Huachao Dong, Tianbo Li
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes a multi-surrogate-based algorithm to optimize BWBUG lift-to-drag ratio, resulting in a 3.3009% improvement.
▶︎ Winglet effect on hydrodynamic performance and trajectory of a blended-wing-body underwater glider
Ocean Engineering
September, 2019
Da Lyuab, Baowei Song, Guang Pana, Zhiming Yuan, Jian Li
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary
Finds that winglets - vertical projections located on wingtips - increase lift force when applied to a BWBUG, while drag remains constant, thereby improving lift-to-drag ratio.
▶︎ Modeling and Motion Simulation for A Flying-Wing Underwater Glider with A Symmetrical Airfoil
China Ocean Engineering
June, 2019
Liang Zhao, Peng Wang, Chun-ya Sun, Bao-wei Song
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes a Newton-Euler method for analyzing the effect of internal actuation on the steady gliding motion of a BWBUG.
▶︎ Shape optimisation of blended-wing-body underwater gliders based on free-form deformation
Ships and Offshore Structures
May, 2019
Jinglu Li, Peng Wang, Huachao Dong, Xumao Wu, Xu Chen, Caihua Chen
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes an optimization framework where Free-Form Deformation (FFD) is used for geometric parameterization. Four cases are performed to maximize lift-drag ratio given thickness and volume constraints.
▶︎ Design and Optimization of a Blended-Wing-Body Underwater Glider
International Conference on Mechanical and Aeronautical Engineering (Proceedings)
December, 2018
Pengcheng Ye, Guang Pan
Affiliation:
School of Marine Science and Technology
Key Laboratory for Unmanned Underwater Vehicle
Northwestern Polytechnical University
Summary:
Proposes a surrogate-based BWBUG shape optimization method that uses seven baseline airfoils to build a parametric geometric model of a BWBUG. Results in a 13.72% increase in maximum lift to drag ratio over the initial design.
▶︎ A simplified shape optimization strategy for blended-wing-body underwater gliders
Structural and Multidisciplinary Optimization
November, 2018
Li Chengshan, Wang Peng, Dong Huachao, Wang Xinjing
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes a method wherein 3-D shape BWBUG optimization is simplified using three 2-D airfoil design problems. For validation, the shape of the BWBUG was also optimized using a direct shape optimization (DSO) method. Under the simplified method (SSO), vehicle lift-to-drag ratio was found to improve by 4.1728%. DSO showed an improvement of 4.4328%. CPU time of SSO, however, was only 16% of that of DSO.
▶︎ Multi-objective optimization design for the multi-bubble pressure cabin in BWB underwater glider
International Journal of Naval Architecture and Ocean Engineering
July, 2018
Yanru He, Baowei Song, Huachao Dong
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes a method for optimizing BWBUG bouyancy-to-weight ratio and internal volume using a multi-bubble pressure cabin.
▶︎ Research on drag reduction effect of winglet applied in blended-wing-body underwater gliders
Journal of Huazhong University of Science and Technology
June, 2018
Lu Da, Song Baowei, Jiang Jun, Huang Qiaogao
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Using computational fluid dynamics, the authors analyze wake flow and drag reduction of BWBUG models given different height, sweep angle and slope angle, and angle of attack. At certain velocities, winglets were found to reduce the magnitude and occurrence of wake vortices.
▶︎ Analysis of Store Separation from Weapon Bay of a Blended-Wing-Body Underwater Glider
OCEANS 2018 (Proceedings)
May, 2018
Jian Li1, Peng Wang, Xu-mao Wu, Bao-wei Song, Yong-hui Cao, Wei Wang
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Using Computational Fluid Dynamic (CFD) analysis coupled with Six Degrees of Freedom (6-DOF) simulation and dynamic mesh technology, the authors analyze a notional internal store separation from a BWBUG weapons bay in the presence of unsteady flow.
▶︎ Adjoint-Based Optimization for Blended-Wing-Body Underwater Gliders' Shape Design
OCEANS 2018 (Proceedings)
May, 2018
Xumao Wu, Peng Wang, Jian Li, Siqing Sun, Yongle Din
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes a computationally inexpensive adjoint-based optimization frame for BWBUG shape design, significantly reducing computational cost. Utilizes a free-form deformation (FFD) method for geometric parameterization and a SLSQP optimizer to perform gradient-based optimization. Results in an improved lift-to-drag ratio in turbulent flow.
▶︎ Optimization Design of a Blended Wing Body Underwater Glider's Configuration
OCEANS 2018 (Proceedings)
May, 2018
Qiaogao Huang, Guanshan Liu, Yunlong Ma, G. Pan, Da Lv
Affiliation:
School of Marine Science and Technology
- Key Laboratory for Unmanned Underwater Vehicle
Northwestern Polytechnical University - System Engineering Research Institute
Summary:
Uses MATLAB, XFOIL, and a genetic algorithm to generate a BWBUG shape optimization strategy based on a parametric model of profile foils, resulting in a 36% improvement in lift-to-drag ratio.
▶︎ Research on Fluid Dynamic Layout of Blend Wing Body Underwater Glider with Tail
OCEANS 2018 (Proceedings)
May, 2018
Yunlong Ma, Guang Pan, Qiaogao Huang, Yao Shi
Affiliation:
School of Marine Science and Technology
Key Laboratory for Unmanned Underwater Vehicle
Northwestern Polytechnical University
Summary:
Simulates a BWBUG using vertical stabilizer and rudder, and analyzes its resulting lift to drag ratio, lateral stability and maneuverability.
▶︎ Parametric geometric model and hydrodynamic shape optimization of a flying-wing structure underwater glider
China Ocean Engineering
December, 2017
Zhen-yu Wang, Jian-cheng Yu, Ai-qun Zhang, Ya-xing Wang, Wen-tao Zhao
Affiliation:
State Key Laboratory of Robotics
Shenyang Institute of Automation
Chinese Academy of Sciences
Summary:
Proposes a surrogate model that uses parametric geometry modeling, mesh generation, and computational fluid dynamics analysis for BWBUG shape optimization, resulting in a 9.1% improvement in hydrodynamic performance.
▶︎ Shape optimization of blended-wing-body underwater glider by using gliding range as the optimization target
International Journal of Naval Architecture and Ocean Engineering
November, 2017
Chunya Sun, Baowei Song, Peng Wang, Xinjing Wang
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes a BWBUG shape optimization strategy that focuses on maximizing vehicle gliding range as opposed to lift-to-drag ratio which can result in loss of payload capacity. Results in a 32.1% increase in gliding range.
▶︎ Structural optimization of an underwater glider with blended wing body
Advances in Mechanical Engineering
September, 2017
Yanru He, Baowei Song, Yonghui Cao
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Proposes a method to optimize the mass of a BWBUG given strength, deformation, and stability constraints in order to maximize vehicle payload capacity and range.
▶︎ Analysis of internal store separation effects on the blended-wing-body underwater glider
National Hydrodynamics Academic Conference
2017
Li Jian, Song Bao-wei, Cao Yong-hui
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Using Computational Fluid Dynamic (CFD) analysis coupled with Six Degrees of Freedom (6-DOF) simulation and dynamic mesh technology, the authors analyze a notional internal store separation from a BWBUG weapons bay in the presence of unsteady flow. Vehicle trajectories are analyzed at different angles of attack.
▶︎ Shape design and motion analysis of a wing-body fusion underwater glider
2017
Sun Chunya
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Applies an aviation "wing-body fusion" to the shape design of the underwater glider. Proposes BWBUG shape optimization design and motion performance analysis methods. Compares and analyzes geometric parameters and hydrodynamic characteristics of three conventional underwater glider shell shapes. Uses algorithmic analysis to optimize BWBUG shape given maximum range as the optimization objective while balancing the vehicle weight, interior space, and hydrodynamic performance.
▶︎ Shape optimization design of a wing-body fusion underwater glider [Citation Only]
Journal of Underwater Unmanned Systems
2017
Sun Chunya, Song Baowei, Wang Peng
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
See: Shape design and hydrodynamic characteristics analysis of wing-body fusion underwater glider.
▶︎ Hydrodynamic performance analysis of a biomimetic manta ray underwater glider
IEEE International Conference on Robotics and Biomimetics (ROBIO) (Proceedings)
December, 2016
Zhenyu Wang, Jiancheng Yu, Aiqun Zhang
Affiliation:
Shenyang Institute of Automation
Chinese Academy of Sciences
Summary:
Analyzes the kinematic and hydrodynamic performance of a biomimetic manta ray underwater glider.
▶︎ Energy consumption optimization of steady-state gliding for a Blended-Wing-Body underwater glider
OCEANS 2016 (Proceedings)
September, 2016
Chunya Sun, Baowei Song, Peng Wang, Baoshou Zhang
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Analyzes the relationship between BWBUG steady-state gliding motion parameters and vehicle energy consumption, and proposes an optimization model for minimal energy consumption per nautical mile.
▶︎ Shape design and hydrodynamic characteristics analysis of wing-body fusion underwater glider
Ship Science and Technology
2016
Sun Chunya, Song Baowei, Wang Peng
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Applies an aerospace "wing-body fusion" to BWUG shape design in order to improve hydrodynamic performance. Compares the geometric parameters of three conventional shapes of underwater gliders. Uses computational fluid dynamics (CFD) to simulate and analyze BWBUG hydrodynamic performance.
▶︎ Parametric geometric model and shape optimization of an underwater glider with blended-wing-body
International Journal of Naval Architecture and Ocean Engineering
November, 2015
Chunya Sun, Baowei Song, Peng Wang
Affiliation:
School of Marine Science and Technology
Northwestern Polytechnical University
Summary:
Analyzes BWBUG hydrodynamic performance using commercial computational fluid dynamics (CFD) software Fluent. Applies a Kriging-based genetic algorithm - Efficient Global Optimization (EGO) - to increase lift-to-drag ratio by 7%.
▶︎ Flying wing underwater glider: Design, analysis, and performance prediction
International Conference on Control, Automation and Robotics (Proceedings)
May, 2015
Wang Zihao, Li Ye, Wang Aobo, Wang Xiaobing
Affiliation:
State Key Laboratory of Autonomous Underwater Vehicle
Harbin Engineering University
Summary:
Proposes an optimized flying wing underwater glider shape design using computational fluid dynamics (CFD). Presents and solves a steady-state glide equation for net-buoyancy and pitch angle under different navigation conditions. Concludes that the flying wing design results in improved gliding efficiency and increased lift-to-drag ratio.
▶︎ Overall Design and Experimental Research of Flying Wing Water Glider [Citation Only]
2015
Wang Aobo
Affiliation:
Harbin Engineering University
Summary:
As Cited In: Research on Hydrodynamic Characteristics of Blended Wing Body Underwater Glider with Rudder
![]()