
Mind the Gliders
This is the first installment of a multi-part series concerning the deployment of semi-autonomous, mobile minefields using strikepods comprised of underwater gliders. In Part I we discuss the underwater glider and its related technologies, and propose a notional design for a blended wing glider-mine. Future installments will focus on concepts of operations (CONOPs), the strategic use and effects of mobile minefields, Red capabilities, glider-mine countermeasures, the role of international law, and tabletop simulations illustrating mobile minefield operations.
Underwater gliders are low-cost, high-endurance, semi-autonomous underwater vehicles that could be weaponized and used to structure large scale, mobile minefields within the water column.
▶︎ Current offensive mining doctrine among advanced navies is predicated on the use of immobile bottom mines deployed in shallow littoral areas and chokepoints.
▶︎ Fitted with target detection technologies and heavyweight warheads, blended wing underwater gliders could be used to create a collaborative pod ("strikepod") of mobile mines to interdict and/or restrict the movement of enemy shipping, surface warships, and submarines operating within deep, open ocean regions, or to carry out strikes against deepsea infrastructure.
▶︎ A mobile minefield would pose a vexing mine countermeasures (MCM) dilemma, as current MCM operations focus on detecting, identifying, and neutralizing bottom or moored mines deployed in relatively shallow (90 meters or less) water.
▶︎ While purpose-built to kill surface and/or submerged targets, the mere presence of mobile mines operating within the water column could generate significant operational or strategic effects through the imposition of psychological costs on enemy forces.
A FIRST GENERATION STRIKEPOD
With the pivot toward strategic/great-power competition, we are witnessing a reinvigoration of mine warfare, and a reimagination of its offensive capabilities in light of emerging technologies. Estimates of current inventories vary, but Russia is thought to possess as many as a 250,000 sea mines, while China, with its keen interest in offensive mine warfare as a key asymmetric capability, may have as many as 80,000 spread across thirty different variants. After years of benign neglect, the U.S. Navy is actively rebuilding its mining capability with four current or planned variants - Quickstrike, MEDUSA/Submarine Launched Mobile Mine (SLMM), Clandestine Delivered Mine (CDM), and the Hammerhead. Meanwhile, several European navies, as well as NATO itself, have invested heavily in the development of advanced MCM capabilities, ostensibly to offset the Russian mine warfare threat in areas such as the Baltic, Black Sea, Mediterranean, GIUK gap, and High North, but also that of China as NATO sets its sights further to the east.
Regardless of national origin, modern sea mines are, for all intents and purposes, lethal autonomous weapons. They are designed to be deployed to the seabed using overt air/surface or covert undersea platforms, and to detect, identify, and engage targets, all without human intervention. These so-called bottom mines are extremely effective, to be sure, but they are, ultimately, immobile - i.e. lying in wait to generate effects in highly structured, shallow (300' or less) regions of waterspace found in littoral areas and chokepoints (though anti-submarine encapsulated torpedo mines are, arguably, semi-mobile, and can operate at depths well in excess of 1000 feet). Given the challenges involved in operating under the surface the ocean, the notion of a viable mobile mining capability has been largely aspirational. Whether Bushnell's floating kegs of the American Revolutionary War, or the infamous drifting contact mines of the Russo-Japanese War, which inspired the first codification of international law regulating the use of sea mines, Hague Convention VIII of 1907, "Relative to the Laying of Automatic Submarine Contact Mines," mobile mines have been unpredictable and dangerous - drifting, uncontrolled weapons propelled by flowing rivers or ocean currents, unable to distinguish between friend, foe, or innocent shipping. Although such drifting contact mines remain in the inventories of Russia and China, as well as rogue states such as Iran and North Korea, in general these types of mines have proven cumbersome to deploy, impossible to control, and largely ill-suited to large-scale offensive mine warfare operations.
But now, with ongoing advancements in underwater technologies and marine robotics, a convergence of mines, torpedoes, and autonomous underwater vehicles (AUVs) is well underway, and mobile mines are destined to be a reality once again, only now they will be controllable and far more capable weapons. At present, however, the challenging and dynamic undersea environment imposes significant (though not insurmountable) limitations on the scope and endurance of missions that could be carried out by a single mobile mine, much less collaborative groups. To be sure, advancements in critical capabilities such as acoustic communications (acomms), navigation, and autonomy are occurring at a rapid pace, and companies like EcoSUB Robotics, Aquabotix, and Sonardyne have demonstrated that underwater swarming is achievable, but the development of a large scale, high endurance undersea swarm platform remains elusive, and this will likely continue to be the case until one particular problem can be overcome: endurance.
All robotic underwater vehicles rely on some form of stored electrical power, which currently provides anywhere from hours to days of endurance. There are two notable exceptions: an Extra-Large Unmanned Underwater Vehicle (XLUUV), like the Boeing Orca, which relies on diesel engines to recharge onboard batteries, and has the potential to deploy for months at a time, and an underwater glider, which relies on a low-power variable buoyancy engine for propulsion. It is the latter of these two classes of underwater vehicle that could provide a near-term workable solution to the energy/endurance problem, and provide the basis for a first-generation, operationally relevant strikepod.
THE UNDERWATER GLIDER
Underwater gliders are unique among AUVs in that they rely on changes in buoyancy for propulsion. Although battery-powered, they consume less energy than AUVs using more conventional modes of propulsion, such as propellers, thrusters, or propulsors, leaving more to power onboard sensors and C2 systems. Gliders are used widely within the global scientific research community, as they are inexpensive, deep diving (anywhere from a few hundred to a several thousand meters), capable of carrying payloads of sophisticated sensors, and can remain in situ for weeks, months, or even years, enabling persistent observation and collection of a wide range of hydrographic data.
A Teledyne Marine "Slocum" Glider. Source: NOAA
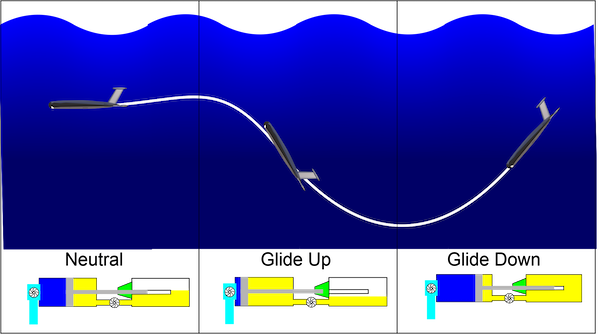
Using a low-power variable buoyancy engine in combination with wings and stabilizers, gliders "fly" through the water column in an up-and-down or sawtooth fashion.
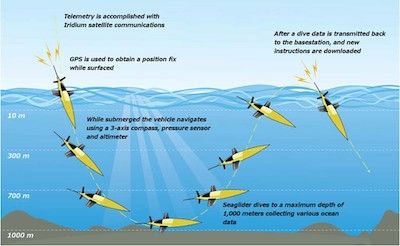
Seaglider flight path. Source: NOAA
The vehicle's communications mast broaches the ocean surface and enables two-way transmissions via RF, WiFi, or Iridium SATCOM. Gliders are programmed to surface at regular intervals to maintain communication with human operators ("pilots"), who can be based anywhere in the world.

A surfaced Seaglider. Source: NOAA
PRIMED FOR DEFENSE
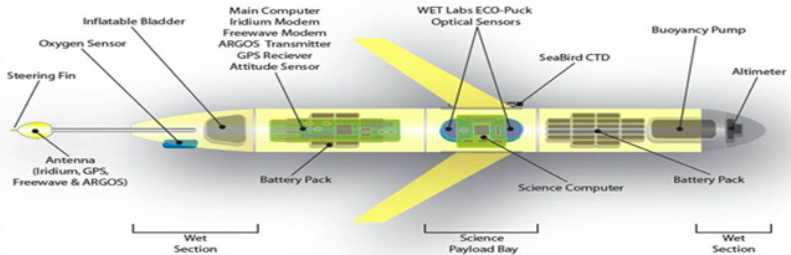
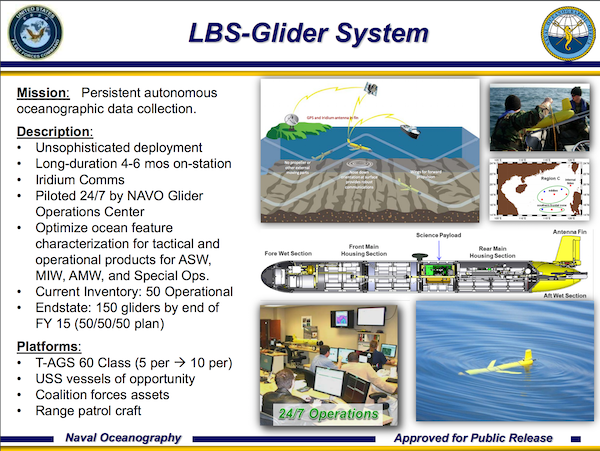
The capabilities that make underwater gliders ideal platforms for scientific observation also make them ideal for defense applications. The United States Navy currently operates a fleet of Teledyne Marine Slocum gliders - Littoral Battlespace Sensing Gliders (LBS-Gs) - which are used for anti-submarine warfare (ASW) and intelligence preparation of the operational environment (IPOE).
Like their scientific counterparts, LBS-Gs also collect and transmit hydrographic data, but for purposes of optimizing undersea warfare operations. Water properties such as depth, temperature, pressure, and salinity all play a role in how sound travels through a given region of water space, which in turn influences the ability of acoustic sensor systems to detect and track underwater targets.
China has also demonstrated an interest in underwater gliders, having conducted extensive research, development, and experimentation, and achieved several high-profile records for both operating depth and endurance. Two notable Chinese variants are the the Haiyi ("Sea Wing"), developed by Shenyang Institute of Automation under the Chinese Academy of Sciences, and the Haiyan ("Petrel"), developed by Tianjin University. Chinese gliders have deployed to both the South China Sea and Indian Ocean, ostensibly for scientific research purposes, with some washing up on the shores of the Indonesian archipelago. Given the dual-use nature of hydrographic data, China, like the United States, is surely deploying gliders for both scientific and ASW purposes. And to those ends, Chinese researchers have also explored the feasibility of underwater gliders as acoustic sensor nodes.
For example, researchers from China's Submarine Academy used a Petrel II to successfully detect a surface ship traveling at 8.4 knots at a range of 7.7km.

Researchers from Zhejiang University attached hydrophones to a Petrel II glider and were able to successfully detect, localize, and track various marine mammals.

Source: The Use of Underwater Gliders as Acoustic Sensing Platforms
In addition to its hydrographic and hydroacoustic sensor capabilities, gliders can be fitted with magnetometers, which are used to detect and identify underwater targets. Researchers from Purdue University successfully mounted a quantum magnetometer on a highly maneuverable underwater glider (ROUGHIE) and demonstrated its capability for magnetic survey operations:
Source: Compact Quantum Magnetometer System on an Agile Underwater Glider
As a passive sensing platform, the military value of the conventional underwater glider is well established. But in order to engage in kinetic operations and provide a foundation for a mobile minefield, it would need to undergo an extensive redesign. The result would be an unconventional, though not entirely novel, AUV.
GLIDER-MINE DESIGN FACTORS
In their present form - a torpedo or teardrop shaped hull roughly two meters in length and thirty centimeters in diameter - underwater gliders provide a compact, low cost, energy efficient platform that is ideal for deploying low-power, lightweight sensor payloads. But in order to pose a credible threat to both surface and submerged targets, a glider-mine would need to accommodate a sizeable warhead as well. It would also require several modifications to enhance its performance in order to effectively intercept surface and/or subsurface targets, namely:
Maneuverability:
Glider-mines would need to quickly change direction when tasked with intercepting an approaching ship or submarine, or to place themselves within striking distance of a target. A high degree of control and maneuverability would therefore be essential. One way this can be achieved is through internal actuation, where instead of, or in addition to, external control surfaces, such as a rudder or ailerons, the glider-mine's internal components are mounted on a rail system that moves from side to side to induce roll, enabling it to make sharp turns, or forward and backward along the length of the hull to control pitch.
The ROUGHIE is also the product of the Purdue team's research into internal actuation:
Speed:
Gliders are capable of long-endurance missions due to their low energy consumption, but this comes at the cost of speed. A glider's cruising speed is approximately 0.5 to 1 knot, and while it could be fitted with a thruster or booster to provide an additional 1-2 knots, this would place an additional demand on the vehicle's power supply and diminish its endurance. In order to improve speed without relying on an increase in propulsive power, a more hydrodynamic hull form would be required. Increased payload weight capacity would also contribute to higher cruising speeds.
Sensors:
In order to detect, identify, localize, and engage either surface or submerged targets, a glider-mine would need to be fitted with the target detection technologies found in modern mines (acoustic, magnetic, pressure). The glider-mine could also be fitted with hydrographic sensors to serve concurrently as an LBS platform.
Communication
The key to an effective glider minefield would be timely and accurate intelligence warning. Robust and reliable communication, both electromagnetic and acoustic, would therefore be critical. Conventional gliders are well equipped for RF and satellite communication, but the physics of the underwater environment places significant limitations on communication through the water column, including low bandwidth, and, depending on factors such as distance and environmental conditions, latency and errors. Strikepod nodes will be transmitting GPS coordinates when surfaced, as well tracking/targeting/navigation data when submerged, necessitating a method of tactical undersea communication to ensure secure transmissions at ranges of up to tens of kilometers. To this end, each node of the strikepod would likely act as a relay to ensure transmissions are properly received by each member of the pod.
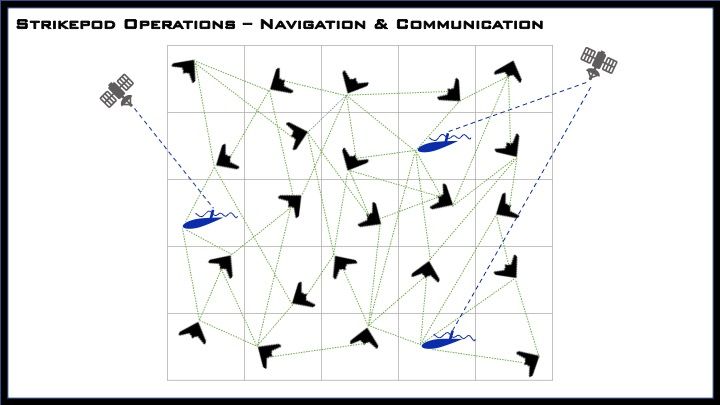
Strikepod data would be transmitted by a surfaced node to surface, air, or land-based assets for processing and analysis. Further tasking would then be transmitted to the next-surfaced node, which would then communicate that tasking to the pod. By organizing the strikepod as a mesh network, each node is dynamically connected to as many other nodes as possible, ensuring timely and accurate communications.
Lethality
For a mine to be materially (and therefore psychologically) effective, it must pose a credible threat - i.e. its warhead must be of sufficient yield to produce a mission kill, at a minimum, if not full destruction of the target, whether surfaced or submerged. While smaller warheads are suitable for mines focused exclusively on ASW (the warhead of the Mk54 lightweight ASW torpedo, for example, is approximately 100lbs, or 45kg ), in order to pose a credible threat to both surface ships and submarines, a glider-mine would require a warhead of considerable size. For comparison, the warhead of a MK48 Mod7 CBASS torpedo, the U.S. Navy's anti-submarine/anti-surface torpedo, weighs approximately 650lbs (295kg). While a direct hit from a Mk48 would ensure full destruction of the target, a manta bottom mine containing roughly 325lbs (148kg) of explosives and deployed at a depth of 60 feet (18 meters) managed to achieve a mission kill on the USS Princeton, a 9600-ton Ticonderoga-class cruiser. Depending on its dimensions, it is also possible that the glider-mine could be fitted with a clandestine delivered mine (CDM), currently planned for the U.S. Navy's MEDUSA, the heir apparent to the Mk67 Submarine Launched Mobile Mine (SLMM). While the CDM's dimensions and warhead size are classified, given that the SLMM was capable of striking both surface and subsurface targets, we can assume that the CDM is capable of the same, and would therefore be suited to glider-mine operations.
Given the above requirements, a glider-mine would require a unique design, one likely inspired by an idea that came into being nearly two decades ago.
FORM FACTOR: BLENDED WING
In the early 2000s, the Office of Naval Research, in partnership with Scripps Oceanographic Institute, Woods Hole, SAIC, Bluefin Robotics, and the applied research labs of Penn State and the University of Texas, Austin, sought to develop a high-endurance underwater glider that was capable of carrying large payloads. The result was the Liberdade-class, of which two were constructed - the XRay and its successor, the ZRay. With their hydrodynamic efficiency and high lift to drag ratio, the blended wing Liberdade gliders were reportedly capable of carrying a payload of approximately 800kg and reaching speeds of 3.5 kts.† In addition to hydrodynamic efficiency, their larger size and payload weight likely also contributed to their enhanced propulsion ("[T]he square-cubed law from classical aerodynamics indicates that larger [gliders can] achieve higher cruise speeds with greater payload capacity.") Equipped for marine mammal observation or ASW hold-at-risk, the vehicle was capable of sustained operations of up to six months. While the "hotel load" (energy required for onboard instrumentation) of mine warfare, such as target detection technologies, may place additional power demands on the vehicle's batteries, reducing its endurance, it would likely still allow for missions of extended duration.
† Edit: A 2005 APL-UW program briefing cited 5 knots as the XRay’s projected cruise speed (based on glide polar modeling), though later at-sea results documented sustained speeds closer to 3–3.5 knots

The XRay
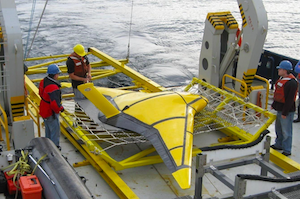
The ZRay
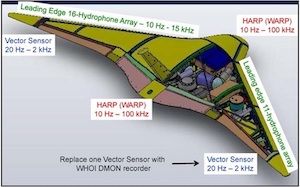
Little has been published regarding the ZRay, and the vehicle has largely disappeared from open sources. There are several references to its role in U.S. Navy PLUSnets (Persistent Littoral Underwater Surveillance Networks), autonomous undersea ASW networks comprised of fixed seabed sensors integrated with a variety of AUVs. With an array of hydrophones positioned along its leading edge, the ZRay would make for a highly effective ASW platform.
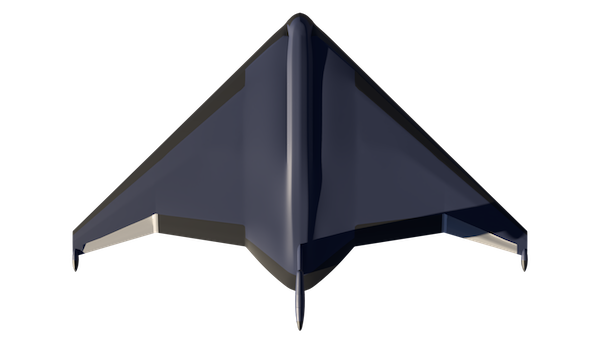
Since the Liberdade program, there has been continued R&D interest in the blended wing as a hullform for autonomous underwater missions that require long endurance and large payload capacity. In 2017, Australian marine engineering company Ron Allum Deepsea Services worked with Australia's Defence Science and Technology Group (DST) to develop a blended wing underwater glider, Deep Ray.

DARPA's current Manta Ray program may be a beneficiary of Liberdade research, as it features a blended wing style vehicle to experiment with different technologies for "a new class of long duration, long range, payload-capable UUVs."
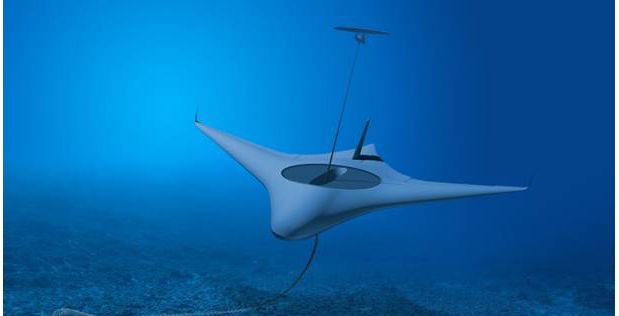
DARPA Manta Ray Concept
There are also numerous scientific studies focusing on blended wing underwater gliders authored by Chinese researchers affiliated with institutions connected to the People's Liberation Army Navy (PLAN). A sampling of recent research includes:
▶︎ Analysis on energy consumption of blended-wing-body underwater glider
International Journal of Advanced Robotic Systems (2020)
Xiaoxu Du, Lianying Zhang
School of Marine Science and Technology, Northwestern Polytechnical University
▶︎ Winglet effect on hydrodynamic performance and trajectory of a blended-wing-body underwater glider
Ocean Engineering (2019)
Da Lyu, Baowei Song, Guang Pan, Zhiming Yuan, Jian Li
School of Marine Science and Technology, Northwestern Polytechnical University
School of Naval Architecture and Ocean Engineering, Jiangsu University of Science and Technology
▶︎ Parametric geometric model and hydrodynamic shape optimization of a flying-wing structure underwater glider
China Ocean Engineering (2017)
Zhen-yu Wang, Jian-cheng Yu, Ai-qun Zhang, Ya-xing Wang, Wen-tao Zhao
State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences
University of Chinese Academy of Sciences
▶︎ Parametric geometric model and shape optimization of an underwater glider with blended-wing-body
International Journal of Naval Architecture and Ocean Engineering (2015)
Chunya Sun, Baowei Song, Peng Wang
School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an, China
A NOTIONAL GLIDER-MINE
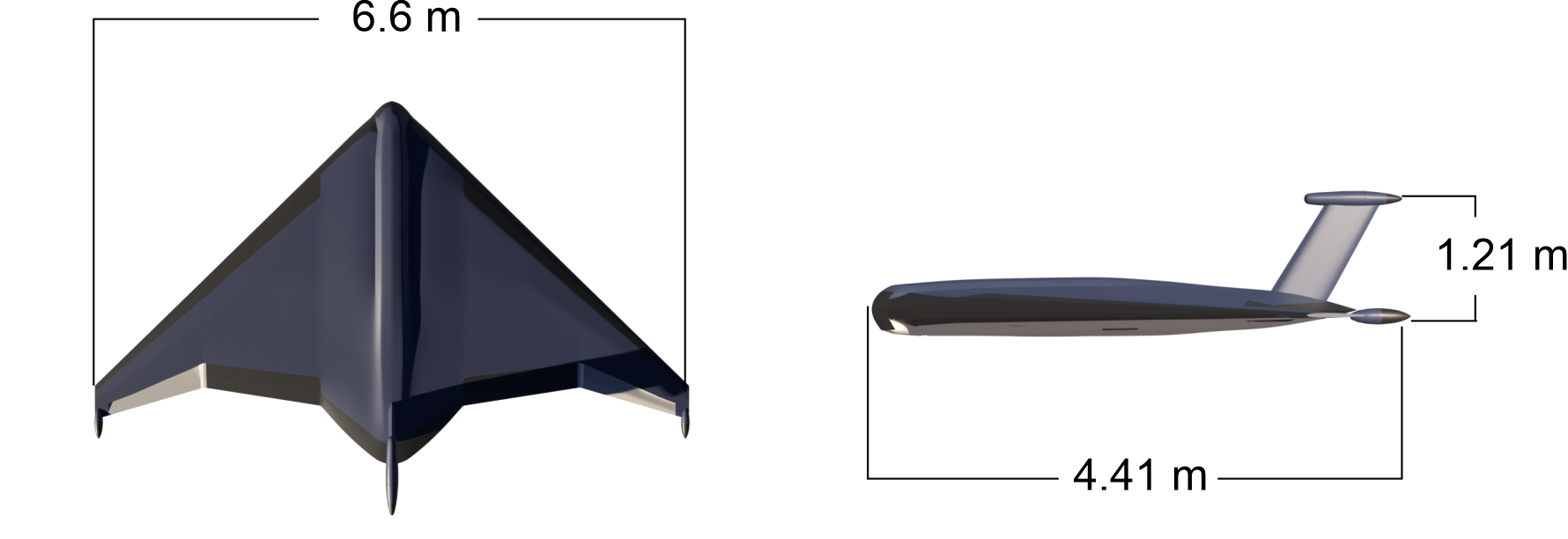
Given the requirements of high endurance, high cruising speed, maneuverability, and heavyweight payload capacity, a glider-mine would likely employ a blended wing design. It would also be equipped with a range of sophisticated technologies for communication, navigation, and sensing, as well as onboard processing for data storage, manipulation, and decision making. What follows is an analysis of a notional glider-mine that incorporates a wide range such capabilities. It should be noted, however, that all components and instrumentation will come with attendant energy costs, and as such any glider-mine design would likely necessitate tradeoffs between operational requirements and endurance.
(Concept Art: Dhimas Afihandarin)

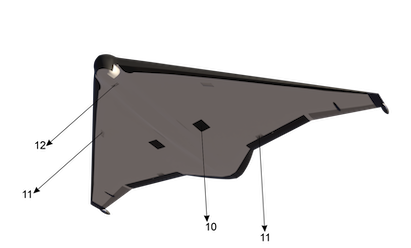
1-Spherical multifunction sonar array aperture 2-Leading edge sensor aperture 3-Magnetometer 4-Roll control surface 5-Rear sensor apertures 6-High definition video camera 7-Main-support structure 8-Water pump, 9-Control surface actuator 10-Magnetometer 11-Ballast tank intake/outtake 12-Buoyancy engine intake/outtake
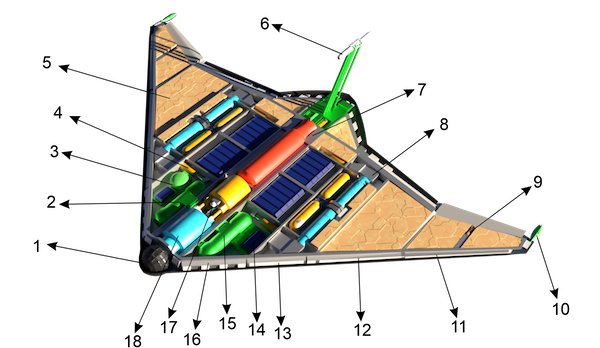
1-Spherical multifunction sonar array 2-Power supply module 3-Emergency acoustic beacon 4-Battery pack actuator 5-Structural foam 6-High definition video camera 7-Main support structure 8- Water pump for ballast 9-Control surface actuator 10- Magnetometer 11,12-Leading edge hydrophone array 13-High frequency underwater modem 14-C4I backup power supply 15-C4I module 16-Leading edge active sonar projector/emitter 17-Buoyancy engine piston motor 18-Buoyancy engine ballast tank
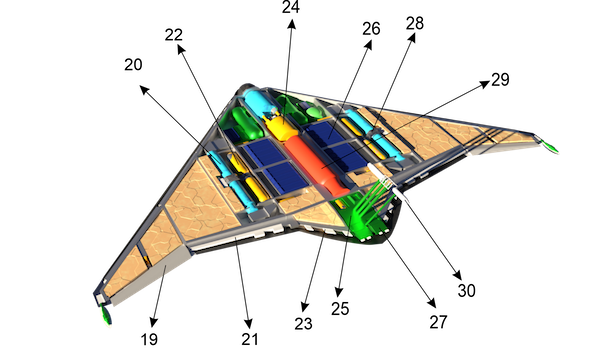
19-External control surface 20- Main ballast tank 21-Trailing edge Hydrophone array 22-Main ballast tank oil reservoir 23- Trailing edge active sonar array 24-Buoyancy engine oil reservoir 25-Rear sensor management system 26- Battery pack 27-Acoustic modem
Propulsion
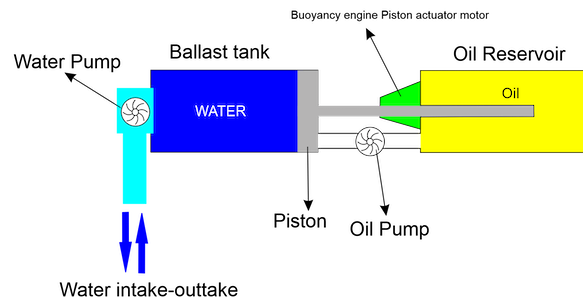
In order to surface, submerge, and propel itself through the water column, a glider-mine would be equipped with an integrated buoyancy and ballasting system consisting of a buoyancy engine, ballast tanks, water and oil intake/outtake pumps, and oil reservoirs.
While submerging, water is pumped into the ballast tanks, displacing the oil into its reservoir, and providing the mass necessary to submerge. To surface, oil is pumped back into the ballast tanks, displacing the water inside. The lower density oil will then provide the necessary buoyancy to ascend. Neutral buoyancy (hovering) can be achieved by balancing the amount of oil and water inside the buoyancy engine and ballast tanks.
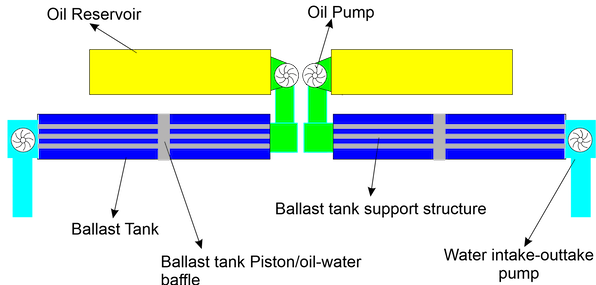
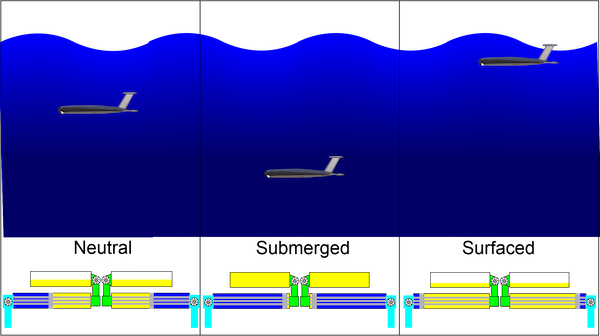
The vehicle's pitch angle would be adjusted in a similar manner. To descend, the buoyancy engine would fill its ballast tank with water, displacing the oil and decreasing vehicle buoyancy, making it “nose heavy” and causing it to pitch downward. To ascend, oil would be pumped back into the tank to provide positive buoyancy, making the nose lighter, causing it to pitch upward.
Energy
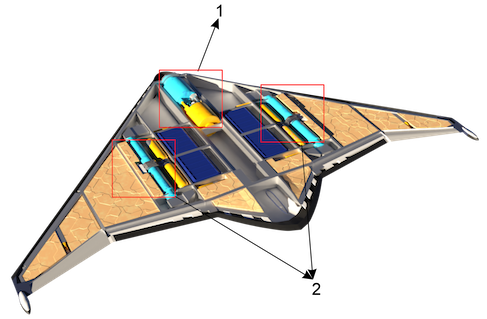
The glider-mine would be powered by two banks of lithium-ion (Li-Ion) batteries. The battery banks not only provide energy, but also would be mounted on a rail structure to provide the internal actuation needed for enhanced roll and maneuverability.
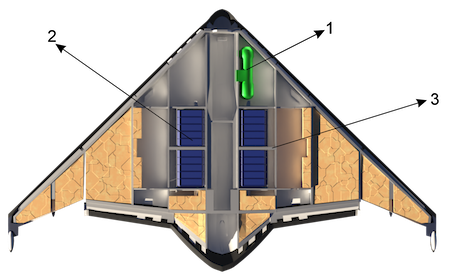
1-Main power supply module 2-Battery bank 3-Power delivery system (embedded within support structure)
Power would be delivered via a busbar system housed within the glider-mine's supporting structure, having first passed through a filtration/conditioning system before distribution to vehicle subsystems.
Maneuvering
To enhance maneuverability, the glider-mine would use both external and internal actuation, with its Li-Ion battery banks mounted on a moving rail system to induce roll. The batteries would be connected to a busbar system which is integrated with the main structure, enabling movement while still providing power to the vehicle.
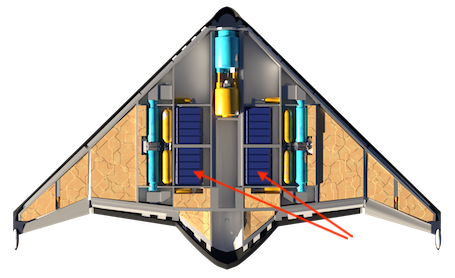
Battery pack shifts left to roll left.
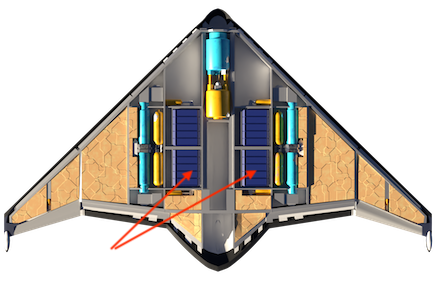
Battery pack shifts right to roll right.
Using internal actuation, a blended wing glider-mine would have a turn radius anywhere from 7 to 30 meters, which at 5 knots could be completed in a matter of seconds.
Sensors
The glider-mine would be equipped with both passive and active acoustic sensors. A high-definition video camera could be mounted on the mast to provide recorded or real-time transmission of still or video imagery intelligence (IMINT).
Multiple sonar apertures would provide for underwater navigation and situational awareness. The main passive elements (hydrophones) would be located within the both leading and trailing edge of the wing. A multipurpose active-passive spherical array could be mounted in the nose or on the vehicle's trailing edge.
Navigation and Communication
The glider-mine would conduct acoustic navigation (USBL) and communication using any of several apertures located within the vehicle's leading and trailing edges, or on the vertical stabilizer. Surface communication, navigation, and data exchange would be conducted via mast antennae.
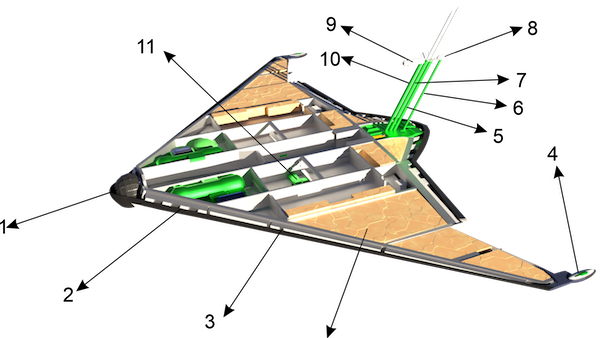
1-Spherical multifunction sonar array 2-Acoustic modem 3-Leading edge hydrophone array 4- Magnetometer 5-Communication/navigation mast 6-Power/data conduit 7-High frequency antenna mast 8-Acoustic modem 9-High definition video camera 10-Power/data conduit 11-Echosounder
Command, Control and Communication
The glider-mine would be equipped with a main computer module charged with controlling all communication, navigation, and sensor operations, as well as processing, manipulating, analyzing, and storing all sensor data. The module would have its own backup power system in case of main power failure, and would have a “burst” capability to allow emergency surfacing or anti-tamper/scuttle/self-destruct. The vehicle could also be equipped with an emergency acoustic beacon to enable retrieval from the seabed.
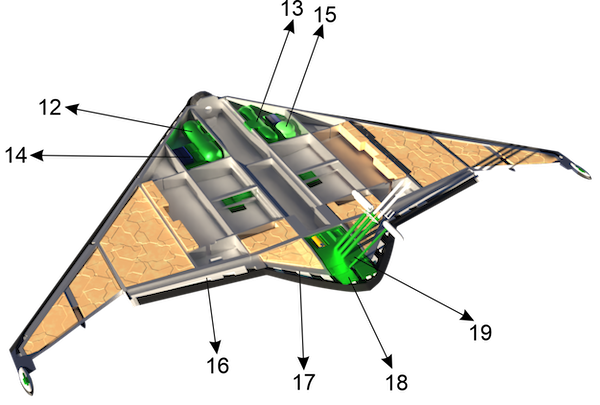
12-Main C4I module 13-Main power supply 14-C4I backup power supply 15-Emergency acoustic beacon 16-Trailing edge hydrophone aperture 17-Trailing edge active sonar array 18-Acoustic modem 19-Rear sensor management system
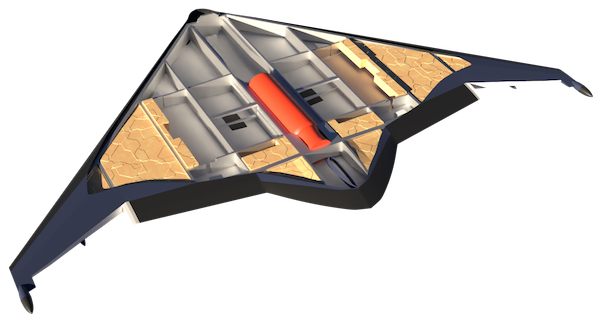
Payload
As a dual anti-surface/anti-submarine weapon, the glider-mine would carry a 300 kilogram (661 pound) warhead, roughly the size of that carried within a modern heavyweight torpedo. (A pure ASW variant could be fitted with a lighter weight warhead, analogous to a Mk54 or Very Lightweight Torpedo (VLWT), which could enable a smaller overall form factor, lower production costs, and enable deployment from a wider range of surfaced/submerged platforms.)
CONSIDERATIONS/LIMITING FACTORS
-
Gliders can be affected by underwater currents, and even with enhanced speed, maneuverability, and ongoing navigational fixes, could drift well off course, with potentially serious implications should one be discovered and/or recovered in contested or territorial waters.
-
Although glider-mines would be considered "controllable mines," deploying them during peacetime, even in international waters, could be perceived as overly provocative, leading to serious political/diplomatic fallout, and potentially precipitating the very crisis or conflict they are intended to deter.
-
Glider-mines would need to be equipped with a robust fail safe system. If a malfunction or critical failure is detected, the weapon should deactivate and scuttle to avoid accidental damage or loss of life, or discovery/recovery by an adversary.
CONCLUSION
Offensive mine warfare will likely play a key role in any future great power conflict. A swarming, smart mine capability would provide a significant advantage, and would pose a serious dilemma for adversaries attempting to establish sea control. While enabling technologies continue to mature, the ability to deploy an operationally relevant strikepod of smart mines remains elusive, and is particularly constrained by the limited endurance provided by the majority of AUVs. A strikepod comprised of large displacement blended wing underwater gliders, however, could provide a near-term underwater swarming capability, enabling the deployment of networked, semi-autonomous, mobile mines to interdict and/or restrict the movement of enemy shipping, surface warships, and submarines, or even to conduct strikes against seabed infrastructure.
Part II will provide an in-depth analysis of strikepod concepts of operation (CONOPs) using blended wing glider-mines.
Many thanks to Dhimas Afihandarin for providing all concept art and engineering insights.