
Mission Europa: The Atom-class XE
[T]he universe is an ocean, the moon is the Diaoyu Islands, Mars is Huangyan Island. If we don’t go there now even though we’re capable of doing so, then we will be blamed by our descendants. If others go there, then they will take over, and you won’t be able to go even if you want to. This is reason enough.
-- Ye Peijian, the father of Chang'e lunar probes
We have entered an era of so-called great power competition, a long-term, geopolitical struggle that will draw upon all elements of national power and unfold not only here on Earth, but within the solar system and beyond.
Science, technology, and innovation are core enablers of national power, and much as the quest for Earthly scientific knowledge has become a breeding ground for rivalry and competition, the exploration of deep space, with its promise of untold wealth and national prestige, will be characterized by the same strategic gamesmanship. As spacefaring nations push the boundaries of exploration and move further into the far reaches of the solar system, we believe that ocean moons, most notably the Galilean moon of Europa, could become flashpoints for interplanetary strategic competition. As such we have developed a new variant of the venerable Atom-class microsubmarine, the Atom-class XE (Extraterrestrial Explorer), that is purpose-built to both enable the exploration of watery worlds beyond Earth, while simultaneously securing the integrity of such missions by deterring and, if necessary, defending them against aggression.
Given the advent of autonomous undersea conflict, and that Beijing's agenda for deep space exploration derives from sweeping and largely unchecked expansionist policies here on Earth, we can be certain that strategic competition will extend well beyond the confines of Earth orbit. And as deep space exploration will likely involve the exploration of ocean moons and worlds using advanced, autonomous microsubmarines, it is reasonable to assume that these systems will be employed as they have here on Earth - to disrupt, and even destroy, in an effort to deny adversaries the ability to freely operate in an undersea environment. It is therefore both necessary and prudent, when contemplating the exploration of ocean moons and worlds, to design vehicles and systems that incorporate not only cutting-edge scientific instruments, but also advanced undersea warfare capabilities.
NASA currently has two Europa missions in its pipeline - Europa Clipper, with a tentative launch in October, 2024, is an orbital spacecraft designed to perform several flybys to conduct scientific observations, including analyzing the vapor plumes from geysers shooting through the icy surface. Years later, Europa Clipper will be followed by Europa Lander, a more complex mission currently under development that could entail landing on the moon's surface, boring a hole through its thick, icy shell, and deploying an autonomous underwater vehicle (AUV) into the subsurface ocean. Inspired by the NASA lander mission, and taking into consideration the evolving security environment and the potential for U.S. adversaries to challenge the United States in outer space, we have designed an integrated lander/AUV system that will establish a base of operations, bore through Europa's ice shell, and deploy a Strikepod of Atom-class XE (Extraterrestrial Explorer) microsubmarines to both explore the ocean environment and, if necessary, defend against adversary aggression.
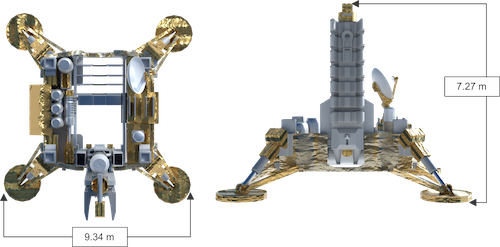
THE LANDER
The lander consists of several components: the carry frame, the support gantry which will house and deploy a subterrene (the ice boring mechanism), a return rocket which will deliver underwater samples back to Earth, a low energy nuclear reactor (LENR), and a Command, Control, and Communications (C3) system. Gold foil Multi Layer Insulation (MLI) protects against the harsh space environment, including Jupiter’s intense radiation belt.
Surface Deployment
Given that a heavy, conventional rocket-powered lander could cause the icy surface to destabilize, the lander employs a skycrane system, a separate rocket stage to control its descent and lower it gently to the surface using graphene tethers. The rocket descender then flies away to deposit itself at a safe distance. The lander features hydraulically actuated, extra wide landing pads in order to evenly distribute ground pressure and prevent cratering.
Power Generation
The lander utilizes an LENR-powered generator to provide electrical power to all onboard systems - computers, communications, gantry motor, and sample return elevator. The generator sheds excess heat using a side mounted radiator which is protected by a sun shade to prevent buildup of solar radiation. The heat transfer medium is helium, which is also used by the subterrene.
Payload and Mission Control
The lander is equipped with a high-definition camera to provide panoramic views of the landing site and to enable structural inspection. Interplanetary communications are handled by a simple dish antenna and radio transmitter/receiver providing direct communication with Earth, or using an orbiting relay satellite. Intra-mission communications are conducted via a fiber optic cable that unwinds from a reinforced spool as the subterrene descends through the ice. The lander is also equipped with a special elevator for handling the sample delivered by a sample return vehicle (SRV) from the under-ice ocean. The elevator lowers to the borehole guard, extracts the sample containers from the SRV, and loads them into the sample return rocket.
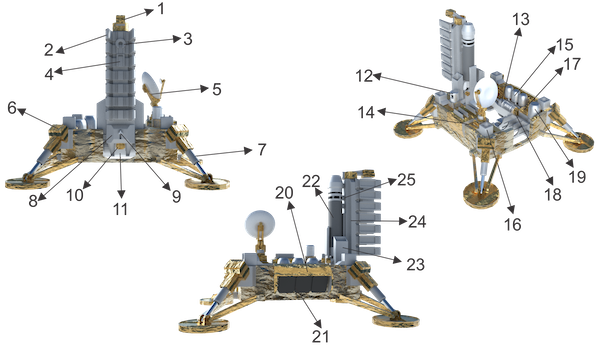
1. Sample return transfer crane
2. Subterrene support clamp
3. Sample transfer elevator
4. Guide rail for sample transfer elevator
5. Communication antenna
6. Landing leg
7. Landing leg shock absorber
8. Fiber optic transmit-receive module
9. Lander-Subterrene fiber optic interface
10. Lander reinforced optic fiber spool
11. Main lander gantry rotator pivot
12. Lander camera
13. Gantry rotator motor
14. C2 section
15. Helium flask for heat exchanger
16. Skycrane attachment point
17. LENR and power supply control box
18. Gantry rotator motor control
19. LENR with gas turbine generator
20. Sun shade
21. Heat radiator
22. Sample return rocket
23. Rocket exhaust flame deflector
24. Support gantry main structure
25. Sample return rocket data and electrical interface
THE SUBTERRENE
The subterrene houses all essential systems and equipment required for borehole drilling operations. It also contains the four Atom-class XE microsubmarines, housed within individual hangars, as well as all related communication, navigation, sample handling, and under-ice mission infrastructure.
Drilling Operations
The subterrene is designed to operate as a heat drill to bore through Europa's thick ice shell. The drill is essentially a heat exchanger driven by large nose mounted LENR with gas turbine generator. As the heated transfer medium (helium gas due its inert nature) passes the turbine and generates power, the heat passes into the drill and sublimates the ice as it releases. The resulting steam will flow upward, directed by the conical nose where it will contact with un-sublimated ice and refreeze outside the borehole lining (see below).
Lining the Borehole
In order to enable the return of samples to the surface, the borehole must remain open and un-obstructed throughout the duration of the mission, a problem that requires a unique engineering solution given that, at anywhere from 15 to 25 kilometers (10 to 15 miles) in length, it will be subject to significant overburden pressure. The solution is graphene, an ultra-thin (one atom thick), ultra-strong (200X steel) material, to reinforce the borehole. The subterrene's graphene liner deployment system is comprised of three components: the outer “sheath” which carries the graphene liner, a dispensing mechanism which ensures the liner is properly deployed, and in order to prevent air pocketing or uneven thickness of re-frozen ice, the dispensing mechanism includes a rotating flattener which will effectively iron the liner as it is dispensed. Re-frozen ice will also provide additional structural stability.
- Heated ring
- Heated fin
- Underwater and ice penetrating module
- Graphene liner sheet
- Surface borehole guard anchor
- Surface borehole guard
- Outer body /graphene handling and storage
- Sample return vehicle (SRV)
- Graphene dispensing mechanism
- Rotating graphene flattener
- Flattener guide rail
- Underwater module
- Graphene sheet
- Graphene handling mechanism
Communication with the surface lander is handled via fiber optic cable, with the main spool located within the underwater module.

1. Surface borehole guard
2. Fiber optic cable
3. Undisturbed ice layer
4. Re-frozen ice
5. Graphene lining
6. Drilling cavity with sublimated ice steam
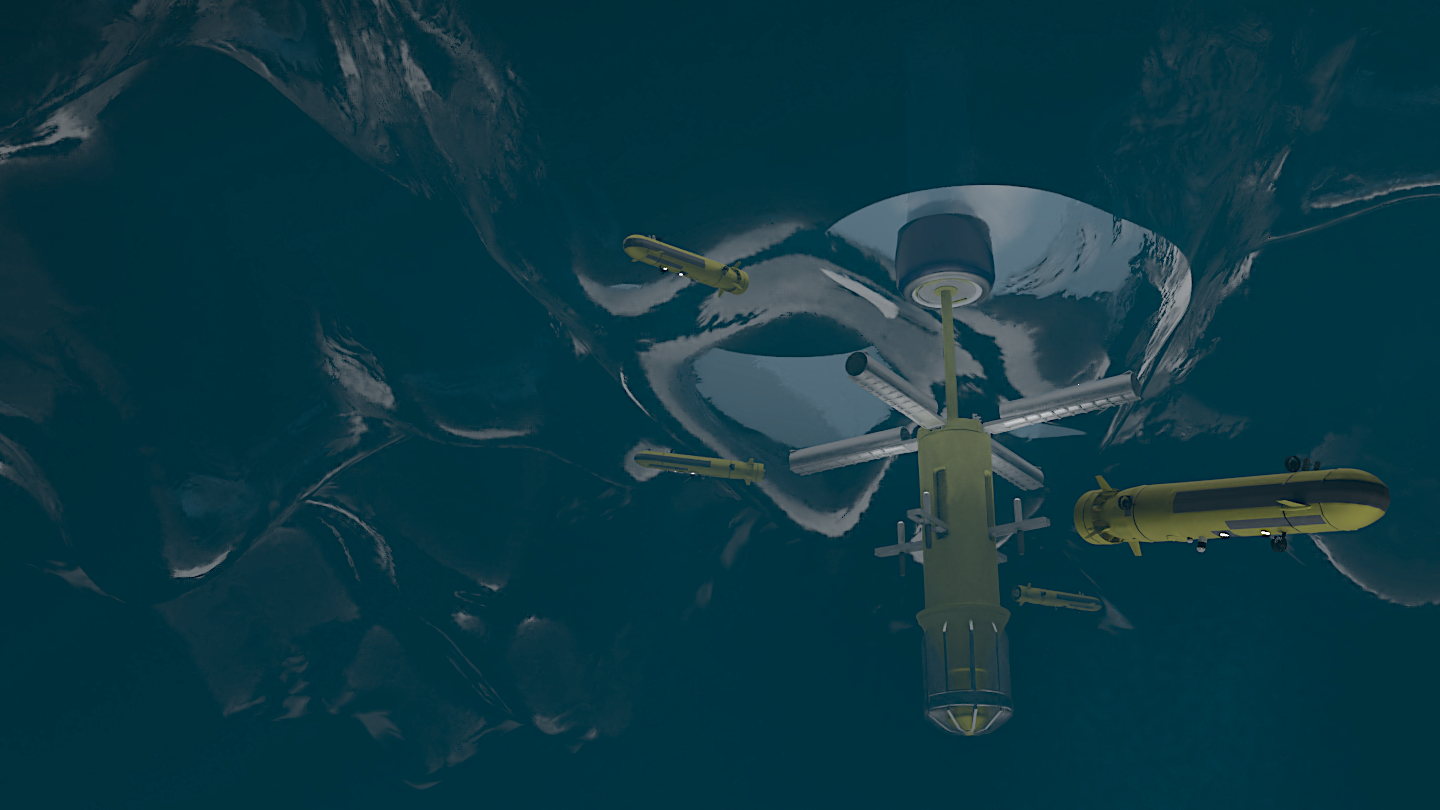
Upon reaching Europa's ocean, the underwater module, constructed of titanium alloy to resist cold brittleness, will detach itself from the outer body, extend into the ocean, then reattach at the edge of the graphene dispensing mechanism, forming a tight seal to prevent backwash. The microsubmarine hangars then unfold to 90 degrees, allowing the vehicles to deploy, with the underwater module now serving as the central communications and navigation hub while they are underway.
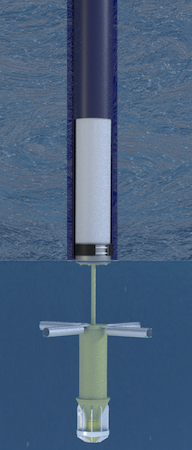
Breaching of the ice layer. The subterrene’s underwater module is deployed into the ocean.
The subterrene consists of three subsystems:
Heat Exchange & Power Generation
Heat and power is derived from the large, self-contained LENR. The LENR heats the transfer fluid (helium), which is used to drive the generator, then passes its heat into the external fins mounted on the outside of the subterrene, providing the means of penetrating the ice. LENR placement ensures an uninterrupted flow of heat for ice drilling, while the generator provides electric power to the underwater module and charges the SRV's high energy density battery.
Data Management
The data management subsystem handles the collection, processing, compression, storage, and encryption of all scientific data downloaded from the microsubmarines, as well as its eventual communication to the lander for transmission to Earth. The main computer, fiber optic spool, and laser transmitter/receiver reside within a climate controlled chamber within the underwater module.
Hangar Operations
This subsystem controls all aspects of microsubmarine deployment and recovery for purposes of data transfer and sample cannister transfer. The system utilizes acoustic transmissions both to communicate with the microsubmarines and to provide USBL navigation. Final approach navigation is conducted using optical beacons. The hangars are deployed and retracted using a linear gearing system driven by an electronic actuator. A labyrinth seal prevents water intrusion during hangar deployment.
Inside, the underwater module is quite complex. Red indicates the main power source, metallic green is the electrical power generator, distribution systems, and high density battery, while blue and white indicate supporting systems.
Internal view of the underwater module along with the return sample vehicle.
1. Heated ice penetration fin
2. LENR with gas turbine generator
3. Reinforcing ring
4. Helium storage flask
5. Heat regulator
6. Main power supply
7. Generator
8. Laser transmitter and central computer
9. Reactor and heat regulator control computer
10. Acoustic modem
11. Cooling medium flask for central computer
12. Underwater LED illuminator
13. Databus for acoustic modem
14. Fiber optic spool
15. Support flange for underwater modem
16. Laser receiver
17. Reinforcing ring
18. Microsubmarine hangar
19. Hangar retraction/deployment control computer
20. Main waterproof labyrinth seal
21. Power supply for hangar retraction/deployment
22. Navigation beacon
23. Hangar retraction/deployment system linear gear
24. Magnetic hook
25. Reinforced fiber optic and power cable duct
26. SRV data interface
27. Waterproof seal
28. SRV extendable wheel bogies
29. SRV electrical charger
30. SRV high energy density battery
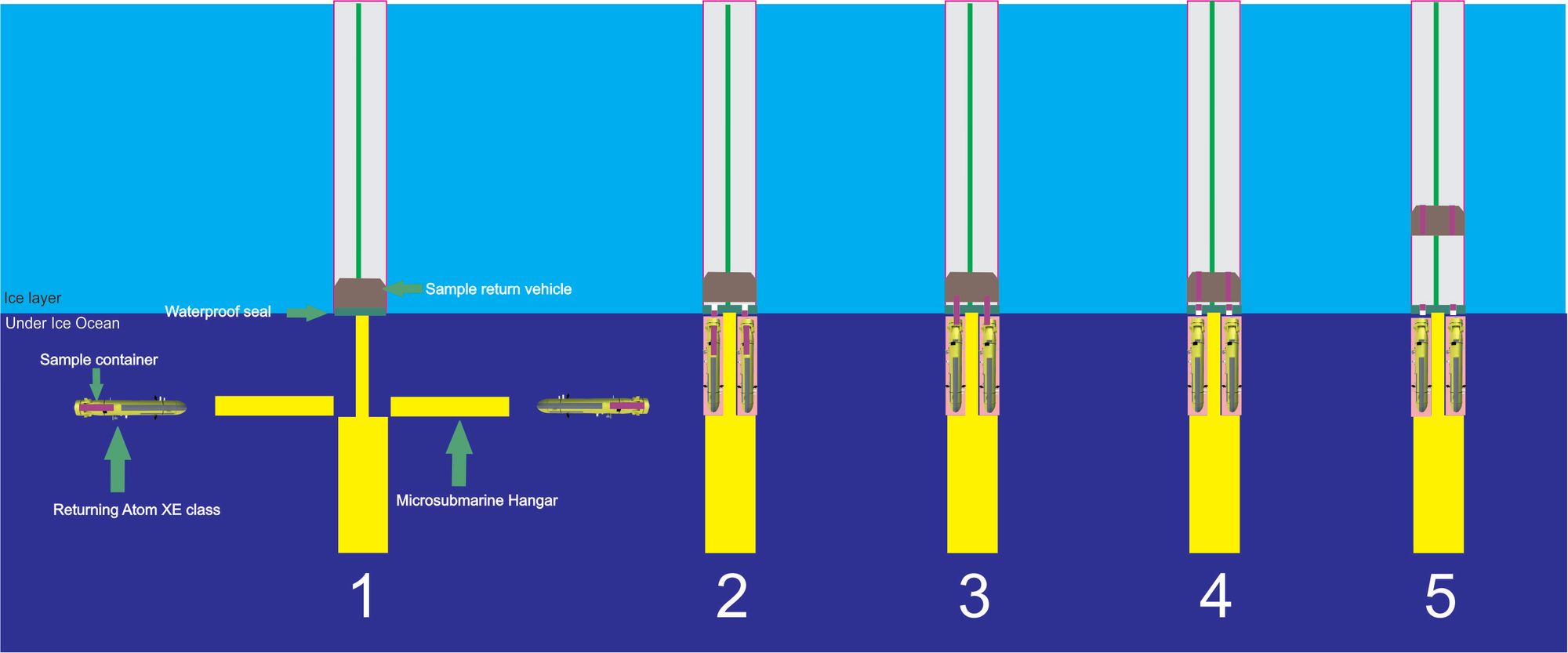
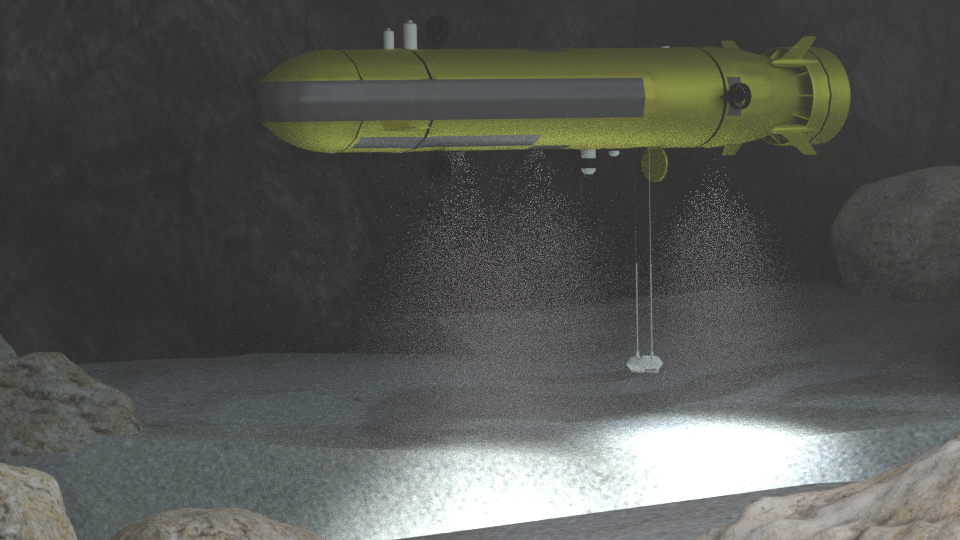
SAMPLE RETURN
One of the more exciting features of the Atom-class XE is its ability to acquire samples of the Europan ocean environment and return them to Earth for further analysis.
-
Upon completion of their sampling mission, the microsubmarines return to their hangars, guided by the underwater module's acoustic and optical navigation beacons, entering bow first.
-
Once the microsubmarines are docked and engaged, the hangars return to their upright position, aligning each microsubmarine's sample container portal with the borehole's waterproof seal.
-
The sample containers are then pushed through the waterproof seal and into the sample recovery vehicle (SRV).
-
The sample containers are secured by the SRV while a new waterproof lining is dispensed, ensuring the integrity of the borehole seal.
-
The sample containers then travel to the surface via the SRV.
Unlike the subterrene and surface lander which are powered by an LENR, the SRV relies on a high energy density battery for electricity. The vehicle is propelled by four extendable in-line wheel bogies which enable it to transit its narrow compartment as well as the wider diameter of the borehole. Upon reaching the surface, the SRV employs four magnetic attachment points to secure itself to the borehole gateway. The dedicated sample collection elevator then extracts the samples and loads them into the sample return rocket.

Delivery of the sample back to the Earth is handled by a solid fueled rocket with a return stage. Solid fuel is used due to its long life and simpler storage/handling compared to a liquid propellant which would require pressurization.

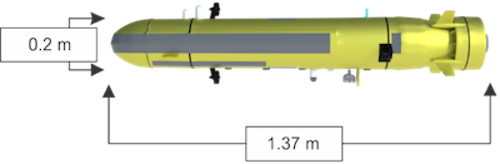
External view and general dimensions of the return rocket.
The return rocket transits to the high orbit of Europa where it will rendezvous with a return mission module to deliver the sample containers to Earth.
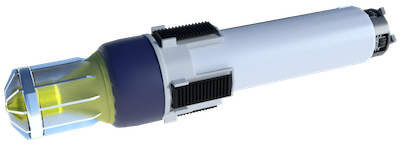
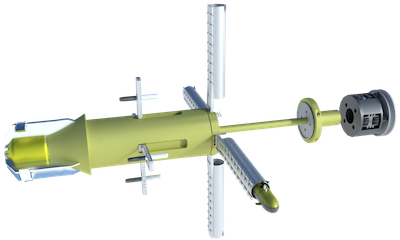
THE ATOM-CLASS XE
The Atom-class XE is a highly advanced microsubmarine designed specifically for the exploration of extraterrestrial ocean environments. The XE has roughly the same mass and displacement as its progenitor, the naval variant Atom-class, but it is slightly shorter in length, and the diameter has been expanded to accommodate a scientific payload.
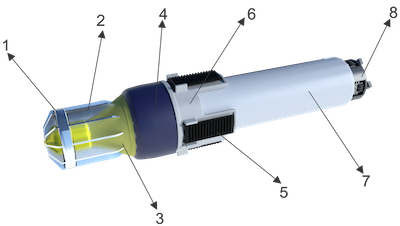
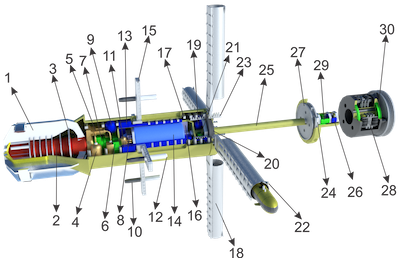
The XE is a highly modular and flexible platform, capable of a wide array of configurations. For purposes of the Europa mission, it is designed to be housed within, and deployed from, an ice-boring subterenne. All appendages and control surfaces are retractable or foldable to facilitate hangar docking operations.
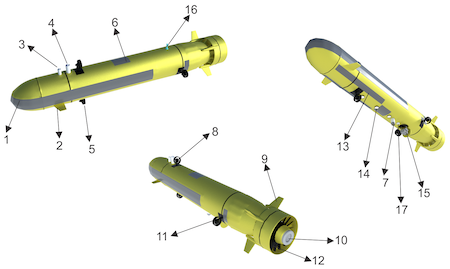
1. Aperture for multifunction Sonar array
2. Diving plane
3. Forward dorsal optical mast
4. Acoustic datalink beacon
5. Retractable ventral maneuvering thruster
6. Doppler water current profiler aperture
7. Ventral optical mast
8. Retractable dorsal maneuvering thruster
9. Foldable tail control fin
10. Sample return tube
11. Port maneuvering thruster
12. Propeller
13. 3D seabed mapping sonar aperture
14. Ventral high power LED lamp for seabed sampling and visual aid
15. Microdredge sampler
16. Ice core sampler
17. Liquid sampler
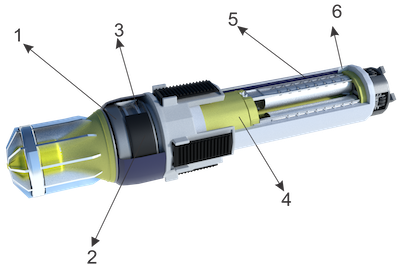
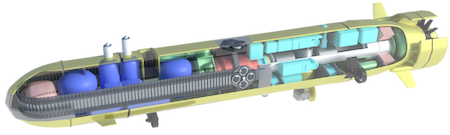
The Atom-class XE consists of four main systems: Command & Control / Sensor Management (Blue), the scientific payload, comprised of sensors, instruments, processing, and data storage (Light Blue), power management and propulsion, centered around the self-contained LENR (Green), and the main ballast tanks (Pink). The gaps between equipment are filled with graphene sponge to provide additional reinforcement against the extreme hydrostatic pressure that the XE will experience while exploring the depths of the Europan ocean, estimated to be 100 km deep.
Command & Control
The XE's C2 occupies the forward portion of the vessel. The system is built around a central processor which handles all navigation, communications, controls, and sensor management, and shares the same high-storage data capacity with the scientific payload.
1. Multifunction-multifrequency, active-passive conformal array (HF)
2. Structural reinforcements, databus for main sonar array
3. Self contained C2 module
4. Forward optical mast module
5. Acoustic datalink module
6. Syntheric aperture sonar array
7. High capacity solid state data storage
8. Dorsal multifunction water current doppler profiler
9. Multifunction-multifrequency, active-passive conformal array (LF)
The XE features several advanced sonar arrays to enable biomass detection, high resolution seabed and under-ice topographic imaging, obstacle avoidance and navigation, as well as passive/active arrays for undersea warfare operations. Communications are provided via acoustic and optical modems, enabling wireless data transfer between vehicles and/or the underwater module. The XE Strikepod can coordinate C2 functions in order to enhance or streamline core operations, such as relaying communications to increase range, combining sensor operations to broaden coverage, or distributing data processing operations.
The XE's C2 is underpinned by an advanced artificial intelligence, Falken-X, a variant of the naval Atom-class AI. Falken-X benefits from many years of deep learning, both in the lab and during real-world deployments, including undersea warfare engagements versus adversary microsubmarines such as the PLAN Shāyú-class. Falken-X has also undergone extensive under-ice and deep water training in both the Arctic and Antarctic regions in order to prepare for the unique operational challenges such an environment poses.
Power & Propulsion
The XE’s power and propulsion are centered around the LENR and the main power supply system which distributes power to all vehicle subsystems. The main propulsion mechanism is a fan/thruster assembly driven by a hollow shaft permanent magnet motor which enables access to the sample collection canister. Thrusters positioned fore and aft provide the XE with a high degree of maneuverability.
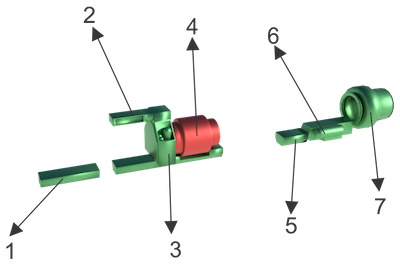
1. Ventral power supply
2. Power supply controller
3. Main power supply
4. Self contained LENR
5. Scientific payload power supply
6. Propulsion control
7. Hollow shaft propulsion motor
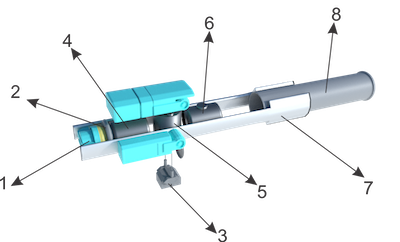
Scientific Payload
The scientific payload occupies nearly half of the vessel, consisting of several sophisticated instruments, including a Mass Spectrometer for Planetary Exploration (MASPEX) - originally designed for Europa Clipper and reengineered for the XE - an eDNA Nanopore Sequencer that provides in situ analysis of ocean water samples to detect the presence of environmental DNA, and an environmental sample handling apparatus capable of collecting and caching three different kinds of samples - liquid, using the ventral water sampler, ice, using the core sampler, and solid, using the micro dredger.
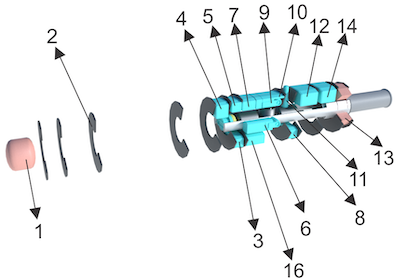
1. Forward ballast tank
2. Structural reinforcement ring
3. Ventral optical mast controller
4. Databus to main data storage
5. Payload management computer
6. Solid sample canister rotator module
7. Water sample collection controller/analyzer
8. Power supply for external ventral LED lamp
9. Microdredge controller
10. Microdredge cable spool
11. Core sampler module
12. Payload management computer
13. Rear ballast tank
14. Highspeed databus interface to surface lander
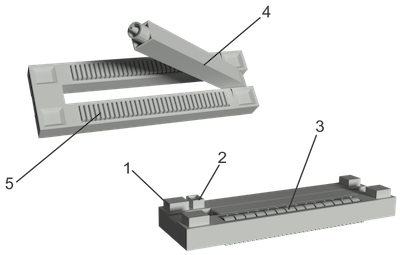
1. Sample guide
2. Sample canister cap
3. Microdredge
4. Water sample canister
5. Solid sample canister
6. Ice sample cryo-canister
7. Sample gatherer guide rail
Samples are cached in separate containers which are then guided into a main sample canister where they await transfer to the lander's sample return rocket via the SRV. Once the samples are retrieved, the sample guide will seal the sample container aperture.
The samples are then carried back to the underwater module where they are transferred to the SRV. The SRV then travels along the borehole to the surface, where the sample canisters are retrieved by the sample elevator and placed in the return rocket. (See Sample Return above.) The hangars redeploy, and the microsubmarines can then conduct additional missions. Limited sampling may still be performed using ballast as material for analysis by the onboard science payload.
Undersea Warfare Payload
In order to deter and, if necessary, defend the mission from adversary aggression, the Atom-class XE will be equipped with a full range of undersea warfare sensors and effectors.
Non-Kinetic:
Similar to the Block II Atom-class, the XE will be fitted with a modified Clandestine Access and Emulation Module (CLAXEM), the CLAXEM-X, a smaller form factor which eliminates the TIIP (Turbo-Injected Intercept Probe). The CLAXEM-X can generate the acoustic and magnetic signatures of a range of underwater craft to deceive adversary microsubmarines, and can flood the area with noise to jam adversary acoustic sensors. Like the Block II Atom-class, the XE CLAXEM-X is also fuly integrated with Minuet, a suite of covert acoustic communications technologies used in penetrating adversary undersea networks for covert surveillance and/or deployment of offensive cyber weapons.
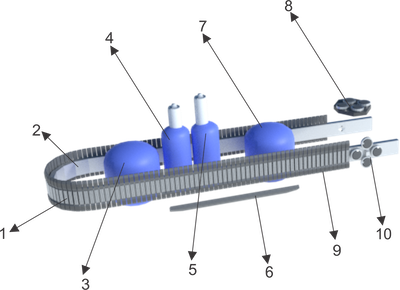
The Block II Atom-class CLAXEM Assembly:
1.Internal attachment point.
2. Direct data and power interface port to carrier.
3. Undersea transmit/receive array.
4. Repeater cable tapping assembly.
5. External magnetic attachment point.
Kinetic:
Unlike the naval variant, the XE does not provide for integration of a shaped charge warhead. We believe that, should the need arise to defend the mission, non-kinetic effectors will be sufficient to disrupt and defend against any incoming attack. Given the sensitivity of the instrumentation and associated technologies, and the desire to preserve numbers for mission redundancy, a kinetic engagement would be a last resort. Should a kinetic engagement become necessary, however, the XE can achieve the velocity and maneuverability necessary for decisive kinetic kill vehicle operations.
The Strikepod Form
Much as the naval Atom-class variant operates in Strikepods while patrolling Earth-bound oceans, so will the XE it while exploring the alien ocean of Europa. Our proposed lander incorporates four microsubmarines capable of carrying out both scientific and undersea warfare missions, with the capability to dynamically adapt in situ, seamlessly moving between exploration and mission defense modes.
Several factors influenced the number of microsubmarines as well as their associated sensors, instruments, and supporting technologies including:
-
Cost: Like all space missions, a landing mission to Europa will be cost-constrained and subject to resource tradeoffs. Though economies of scale are possible when deploying more than a single microsubmarine, on an absolute basis the cost will be quite high and therefore challenging to justify to policymakers.
-
Overall Scientific and Defensive Mission Objectives: This will determine the sensor, instrumentation, and, in turn, processing and storage requirements. A larger Strikepod will provide greater distributed sensing, processing, and data storage capabilities, as well as broader coverage, greater redundancy, and a more robust defensive capability.
-
Anticipated Threat:. While the sensor composition will be similar to that of the naval variant, the effectors, the means to counter and repel attacks by adversary microsubmarines, will depend on the nature and scale of the threat. The potential for cyber or acoustic attacks will necessitate onboard counter-jamming and counter-cyber effectors. With kinetic attacks also possible, the Strikepod must be constructed in a manner similar to a combat Strikepod, with Atoms capable of evading attacks and dynamically re-designating as kill vehicles for counter-attacks.
-
Payload Constraints: Mission payloads will be constrained by the mass and dimensions of the lander, which will in turn be driven by constraints imposed by the mission delivery vehicle. The greater the payload mass, the higher the takeoff weight, with a ripple effect for velocity, time, and, of course, cost.
A NEW PLATFORM FOR A NEW AGE OF COMPETITION
Though decades away, great power competition will extend well into the solar system and beyond, subsuming all aspects of space exploration, including astrobiology. The discovery of extraterrestrial life, which promises to be one of the greatest scientific achievements in the history of humankind, also promises untold national scientific prestige. As such, it is only a matter of time before microsubmarines could be clashing under the oceans of alien worlds, much as they have here on Earth. The Atom-class XE microsubmarine, with its integrated scientific and undersea warfare payloads, can enable the exploration of watery worlds beyond Earth while simultaneously deterring and, if necessary, defending against adversary aggression. Though a peaceful, collaborative, multinational approach to space exploration may yet be possible, the time is now to plan and prepare for the very real possibility of extraterrestrial undersea conflict.
![]()