
Countering Poseidon

Development of Poseidon, Russia's autonomous nuclear-powered, nuclear-armed, autonomous "doomsday" torpedo (NATO reporting name: Kanyon), continues apace. Though still years away from deployment, it is critical not only to ascertain this weapon's capabilities, performance characteristics, CONOPS, and related tactical doctrine, but also to design and deploy effective countermeasure systems.
Russia continues to move forward with the development of Poseidon's host platforms.
-
The lead boat of a new class of submarine, Khabarovsk, based on the Borei-I class SSBN and purpose-built to host six Poseidons, is scheduled to be floated out at any time.
-
Belgorod, a modified Oscar II "undersea mothership" that is expected to carry up to eight Poseidons, is reportedly undergoing sea trials, though satellite imagery indicates that she has yet to depart Severodvinsk since being floated out in April. Belgorod is a host for midget submarine Losharik, still undergoing repairs in the wake of its fatal fire last summer, a likely cause for the delay. Meanwhile, a scheduled test firing of Poseidon in the White Sea is scheduled for this fall.
-
There are also indications that a seabed variant, called Skif, may also be under development, however this has not been verified.
Defending against Poseidon will require a two-pronged approach that combines intensive, full-spectrum anti-submarine warfare (ASW) operations with innovative tactics that leverage proven undersea weapons platforms fitted with advanced technologies.
1. MONITOR HOST PLATFORMS
To the extent that Poseidon is a submarine-launched intercontinental underwater missile, its host platforms are analogous to ballistic missile submarines, and as such should be aggressively monitored like any adversary SSBN.
-
Belgorod may be deployed to the High North where it will be used in GUGI (Main Directorate of Deep-Sea Research) seabed warfare operations as Russia expands its influence in the Arctic and the North Atlantic. As a quasi-SSBN, Belgorod would join other Russian SSBNs in utilizing the natural acoustic masking provided by the Arctic ice floes as a defensive bastion, a practice that has been a mainstay of Russian naval nuclear strategy since the Cold War.
-
The four planned Khabarovsks are expected to be evenly distributed to the Atlantic and Pacific, two boats each for the Northern and Pacific Fleets. These boats are expected to borrow heavily from the Russian Borei class SSBN, incorporating many of the state of the art quieting and countermeasure technologies.
Given the inherent complexity of detecting and tracking undersea targets in the vastness of the open ocean, we must assume that in the event of war, the West may not have a lock on each of Poseidon's host platforms, necessitating a means to counter the weapon itself.
2. DESIGN COUNTERMEASURES
Current and planned systems in the Navy's inventory could, with technological enhancements and modifications, provide an effective barrier against a Poseidon attack. Two variants would be necessary:
-
A fixed seabed system using Hammerhead encapsulated Mk54 torpedoes to defend the littorals (ports, choke points, critical infrastructure) - essentially an integrated underwater defense system (IUDS).
-
A blue water system to defend carrier strike groups (CSGs) consisting of mobile launchers (submarines, UUVs, helos, MPAs) armed with Mk48 ADCAPs or Mk54 VLWTs, which, depending on location and environmental conditions, may be augmented by seabed and/or surface sensors.
The two systems would share a similar design architecture and utilize similar tactics to detect, identify, localize, establish an integrated kill box, and engage Poseidon at standoff range. The concept is essentially a counter-UUV Strikepod blending the speed/maneuverability of modern torpedoes with the AI/comms of UUVs. (Torpedo endurance is very limited, but UUVs, for now, lack the propulsive power to engage a target like Poseidon.)
- - Detection, Identification, Localization
Though referred to as both an AUV (autonomous underwater vehicle) and a torpedo, for purposes of countermeasure design, Poseidon is essentially a small, fast moving submarine, and like any submarine, it will radiate noise - particularly when running at high speed - which can be detected via passive sonar systems located on the seabed, on the surface, or within the water column. Nevertheless, ASW is an extremely time-consuming and tedious endeavor, and detecting, identifying, and tracking Poseidon will be extremely challenging.
-
Modern nuclear powered submarines incorporate sophisticated sound dampening and vibration control systems to minimize acoustic emissions. While it is possible that Poseidon is similarly equipped, given space limitations it is unlikely. Beyond design constraints, Russian planners also likely believe that Poseidon's speed and cruising depth render it invulnerable to most, if not all, NATO torpedoes, making such measures unnecessary.
-
How the West will obtain Poseidon's unique acoustic signature is beyond the scope of this article, but suffice it to say that it will be critical to the development of a counter-Poseidon weapons system. Submarine sea trial deployments can be detected using all-source intelligence analysis (satellite IMINT, SIGINT), and can be communicated/tasked to in-situ submarines and sensor networks, but while similar sources and methods may assist in identifying Poseidon's planned test firings, the testing itself may take place within Russian territorial waters, making it difficult and risky to obtain quality acoustic intelligence (ACINT). In lieu of ACINT, imagery and design data obtained via cyber or HUMINT operations could be used to generate sophisticated computer models that simulate Poseidon's acoustic signature, enough to provide an approximation for rough detection and signal processing purposes.
An integrated network of seabed, surface, and undersea sensors would provide a distant early warning (DEW) sonar network for the swarming Hammerhead system.
-
Passive sonar would provide initial detection and bearing.
-
Once detected, unmanned undersea systems such as fixed arrays, UUVs, USVs, sonobuoys, and floating surface nodes would use active sonar to verify, identify, and track the contact.
-
Unlike manned ASW operations, where the employment of active sonar exposes the source's position, making it vulnerable to counterdetection, employing active sonar using unmanned, attritable systems effectively removes this risk (provided manned platforms are clear of the engagement area), providing a more precise tactical picture, and an effective means to manipulate Poseidon's AI for a kill.
- - - Decision and Engagement
Once detected, identified, and a bearing established, the Swarm AI will quickly generate an initial firing solution, taking into account Poseidon's current course, depth, and speed.
-
Once launched, the Swarm AI will begin the process of projecting and analyzing the near-infinite number of tactical scenarios that could unfold as Poseidon responds, adjusting its defensive maneuvering accordingly.
-
This OODA loop (Observe, Orient, Decide, Act) will continue throughout the engagement as the two AIs square off, move for countermove, with Poseidon attempting to out-think, out-maneuver, and outlast the Swarm, with the Swarm attempting to drive Poseidon into a kill.
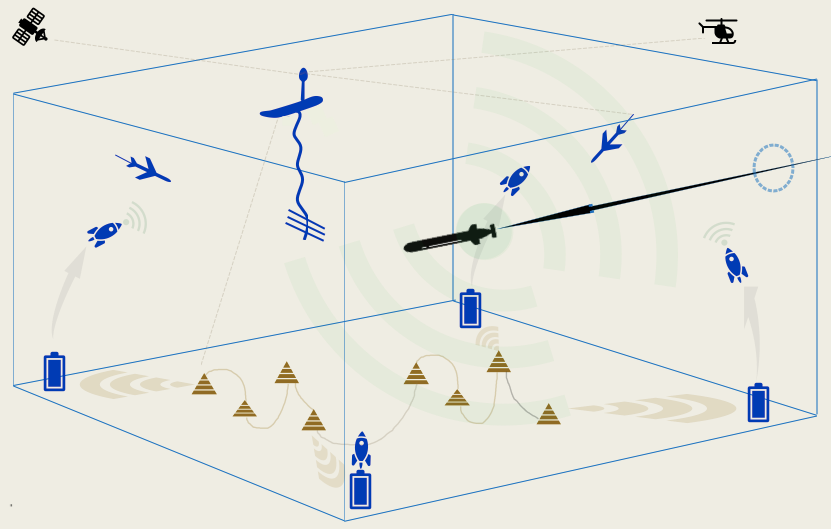
Figure 1: An Integrated Undersea Defense System (IUDS) kill box comprised of sensors (gliders, wave gliders, seabed sensors) and effectors (encapsulated swarming torpedoes). Surface, air, and satellite communication nodes provide warning and cueing to shipborne and land-based systems.
Open sources suggest that Poseidon (70kts) could outrun Mk48 ADCAP (est. 60 kts) or Mk54 (est. >40 kts) torpedoes, but this would primarily be a factor in engagements originating in the vehicle's rear hemisphere - i.e. all-out pursuit. During engagements originating in the forward hemisphere, however, a swarm of countering torpedoes would have the advantage of maneuverability and numbers, but only with adequate warning to launch, orient, and engage before Poseidon can evade and escape.
While Poseidon's speed, endurance, and depth do provide a considerable performance advantage, it is reasonable to assume that its onboard AI will also be trained to defeat countermeasures and/or counterattacks, either by deploying decoys/jammers, or by maneuvering to avoid incoming fires. It is further reasonable to assume the AI's training will incorporate the presumed (or known) performance data of NATO torpedoes.
-
While (possibly) slower, torpedoes will be more maneuverable than Poseidon. A 2000 NPS thesis, "The relationship between a submarine's maximum speed and its evasive capability," assumes that a lightweight torpedo running at 40kts will have a turning radius of 65 meters, while a small, conventionally powered submarine with a 1000 ton displacement running at 24 kts has a turning radius of 120 meters. Though smaller and lighter than a conventional submarine, it is reasonable to assume that Poseidon's maneuverability will be similarly inferior to a lightweight torpedo.
-
The goal would be to force Poseidon's AI to perform defensive turns that rob it of energy (i.e. speed), and, using active sonar to manipulate the weapon's path, drive it into awaiting kill vehicles.
-
Evasive maneuvering will cause Poseidon to slow, bleeding off energy as it turns - the harder the turn, the more energy lost, the greater the deceleration, placing it within the envelope of conventional torpedoes.
-
Poseidon's AI will likely also seek to leverage its superior (unlimited) endurance to outlast the limited (10km) endurance of the Mk54.
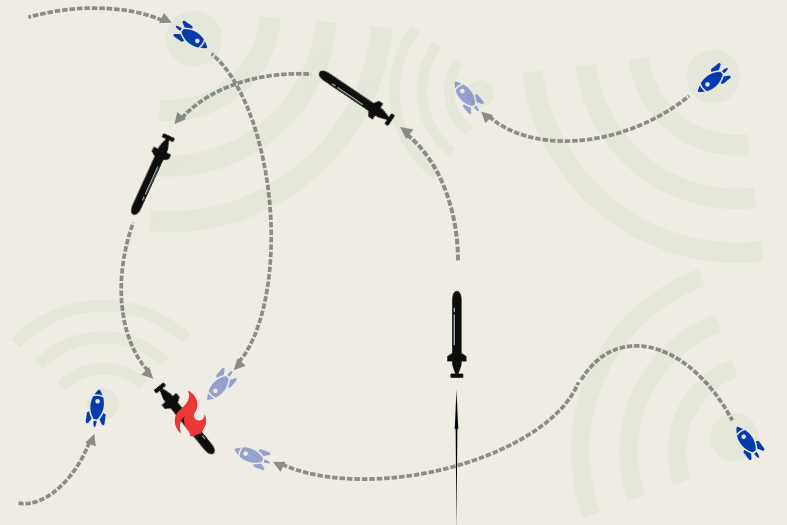
Figure 2: Swarming torpedoes descend upon Poseidon, forcing it to turn, bleed energy, and maneuver into the path of kill vehicles.
Figure 2 is a 2D representation of a kill box engagement which illustrates the conceptual use of active sonar in driving Poseidon into awaiting kill vehicles. An actual engagement would of course take place in three dimensions, with the torpedoes seeking to prevent Poseidon from using its depth capability as an escape vector. While this may not be as much a factor during littoral engagements, it would likely be a factor during tactical blue water engagements against CSGs. Moreover, open source imagery intelligence indicates that Poseidon is not equipped with maneuvering thrusters (either internal or external), and therefore any movement in the horizontal or vertical planes will be initiated by rudder or horizontal diving planes, suggesting that the weapon will maneuver slowly, making it vulnerable to head-on attacks. The weapon's turn radius, as previously noted, will also be quite large - larger than what is depicted in Figure 2 - a weakness exploitable by tighter-turning torpedoes.
The counterattacking Swarm AI would be distributed across all sensors and effectors in order to provide the "omnipresence" necessary to coordinate high-intensity operations in a three dimensional tactical environment.
-
Once the torpedoes are launched, they would utilize short burst acoustic transmissions to coordinate sensor readings, relative position, situational awareness, and attack geometry.
-
The Swarm will need to properly discriminate sensor readings to ensure that the torpedoes do not mistakenly target each other. Moreover, while Poseidon will likely rely on its speed and running depth to defend itself, the weapon may also possess countermeasures similar to manned submarines, and as such the Swarm-AI will need to detect, classify, and ignore noisemakers and decoys.
While running at high speed, Poseidon's passive sonar sensitivity will degrade due to reactor and hull flow noise.
-
As such the weapon may be unable to detect and localize a seabed torpedo launch, or even detect the incoming torpedoes themselves.
-
This would enable them to close the distance before activating acoustic communications and switching to active sonar for terminal phase, at which point it would be too late for Poseidon to escape.
BLUE WATER DEFENSE
The above approach is for defeating an incoming strategic attack - i.e. one targeting a port or coastal infrastructure. But Poseidon may also be employed as a tactical nuclear weapon to destroy carrier strike groups (CSGs) or even SSBNs, in which case a fixed defensive system will not be adequate to the task.
Defending a CSG, then, would require a somewhat different approach, one that cannot rely entirely, if at all, on the fixed seabed sensors/effectors of an IUDS. On detection, manned submarines, (high-speed) XLUUVs, or (not pictured) ASW drones, helos, or MPAs, would sortie to intercept, establish a kill box, and engage with swarming torpedoes. Figure 3 underscores the need for long range engagement, especially as Poseidon is capable of traveling 1 nm in 51 seconds.
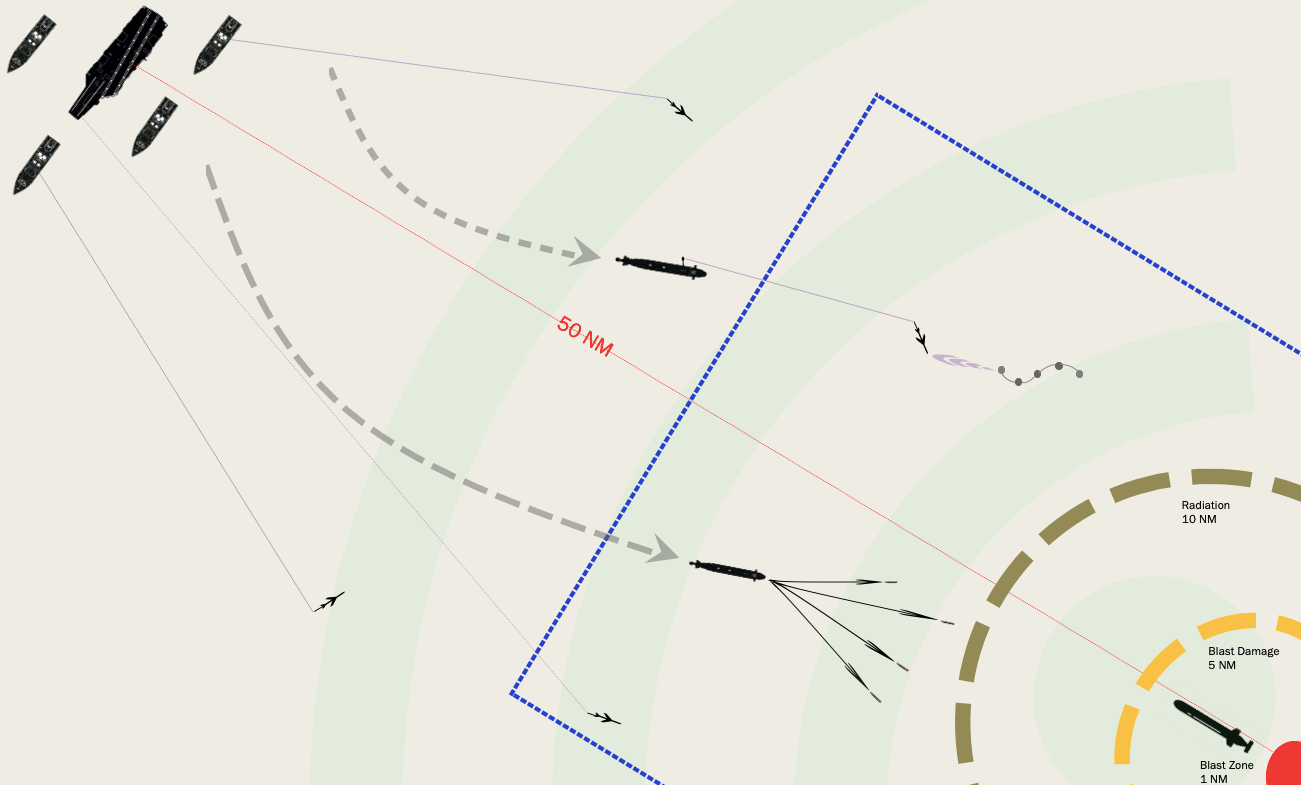
Figure 3: A blue water defensive operation, including effects zones for a 2MT ground burst using NUKEMAP (@wellerstein)
In July, 2019, we proposed the idea of "Autonomous Undersea Denial Networks" (AUDENs) - flexible systems of sensor and effects-based UUVs which can be deployed from energy modules located on the seabed and/or within the water column. Each AUDEN is a compact module that can be rapidly deployed from submarines, surface ships, or even aircraft. One of the key assumptions of AUDENs, however, is that the UUVs will be capable of a significant sprint speed, something unavailable to current UUVs. In the absence of a significant power source, UUVs will be confined to speeds in the single digits to low teens, making them unsuited to confronting and defeating a high-speed threat like Poseidon. Thus, the effectiveness of AUDENs would depend in large part on the (approaching) convergence of UUVs, torpedoes, and mines.
A rotation of UUVs could also be deployed from escorting MUSVs utilizing a built-in UUV docking bay, enabling persistent, wide area sensor coverage. We proposed such a capability with the Esquire-class "Microfrigate" (MUSV).
HI Sutton has proposed a coastal defense concept as well, with sensors arrayed along the seabed and networked to encapsulated torpedoes. Sutton has also put forth a long range defensive system that involves submarine-launched hypersonic glide vehicles.
NON-KINETIC EFFECTS
There is also the potential for non-kinetic effects to be employed by the Swarm, nearby submarines/UUVs, undersea nodes, or by Poseidon itself. For example, Poseidon may be able to jam Swarm communications using acoustic countermeasures. The Swarm may be able to manipulate Poseidon's AI using acoustic emulators to project false targets, or to inject false sensor readings to deceive onboard navigation systems, forcing a "controlled flight into (underwater) terrain" - CFI(U)T. Our analysis of the potential for undersea cyber operations can be found here. An analysis of Poseidon-specific cyber operations will be the subject of a future post.
GAMING THE SYSTEM
We are currently developing a version of Strikepod Command that is specifically designed to simulate countering a Poseidon attack using a range of unmanned undersea systems - seabed sensors and effectors, sensors within the water column, unmanned surface vessels, as well as Strikepods, networks of advanced microsubmarines which can be configured both as sensors and effectors. The game also includes cyber operations, and the capability to manipulate Poseidon's AI through denial and deception. Countering a novel weapon requires equally novel ideas, which we hope Strikepod Command: Countering Poseidon will do.
Stay tuned.
![]()